I am trying to use kinematic to let the robotic arm carry the box,but I cannot make the box move with the robotic arm,what should I do to fix it,thanks!
this is my file機械手臂.fsm
I am trying to use kinematic to let the robotic arm carry the box,but I cannot make the box move with the robotic arm,what should I do to fix it,thanks!
this is my file機械手臂.fsm
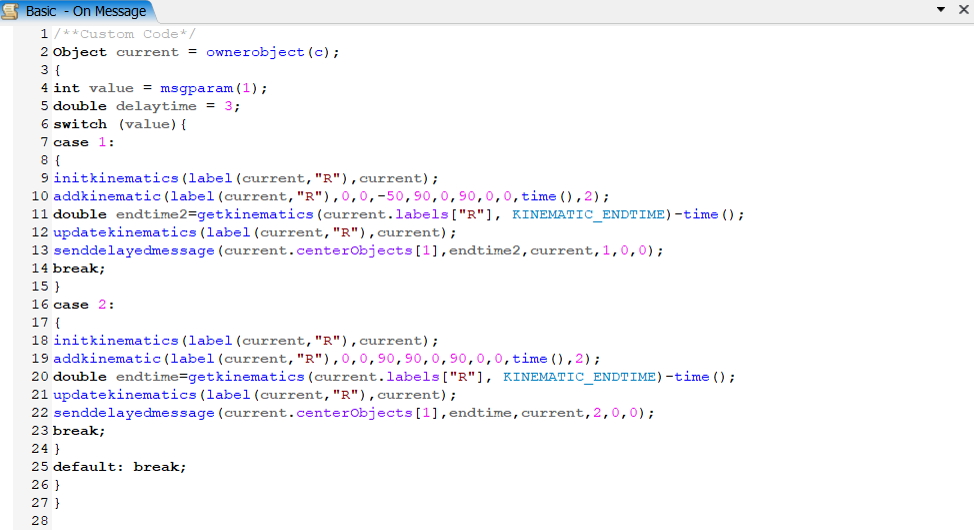
Your robot isn't tied to any events in the system, nor to any spatial locations - what you've created is, in effect, an animation with incorrect joints that is triggered from the exit of the source. You should complete some tutorials on the animation editor if this is the level of sophistication you require.
Your Robot is a set of nested objects rather than one object with surrogates - so putting the item/box into the final joint will make it move with the set of movements you've created.
Can I ask is this just for learning experience? Why don't you just use the standard robot object and reskin it ? It has all the inverse kinematics you will need to do this correctly.
14 People are following this question.
FlexSim can help you understand and improve any system or process. Transform your existing data into accurate predictions.
FlexSim is a fully 3D simulation software environment. FlexSim can be used to simulate any process in any industry.
FlexSim®, FlexSim Healthcare™, Problem Solved.®, the FlexSim logo, the FlexSim X-mark, and the FlexSim Healthcare logo with stylized Caduceus mark are trademarks of FlexSim Software Products, Inc. All rights reserved.
May we collect and use your data?
Learn more about the Third Party Services we use and our Privacy Statement.May we collect and use your data to tailor your experience?
Explore the benefits of a customized experience by managing your privacy settings for this site or visit our Privacy Statement to learn more about your options.