Hello,
I tried to define logic that AGV can stop on transfer cluster, so I place control point on tranfser cluster.
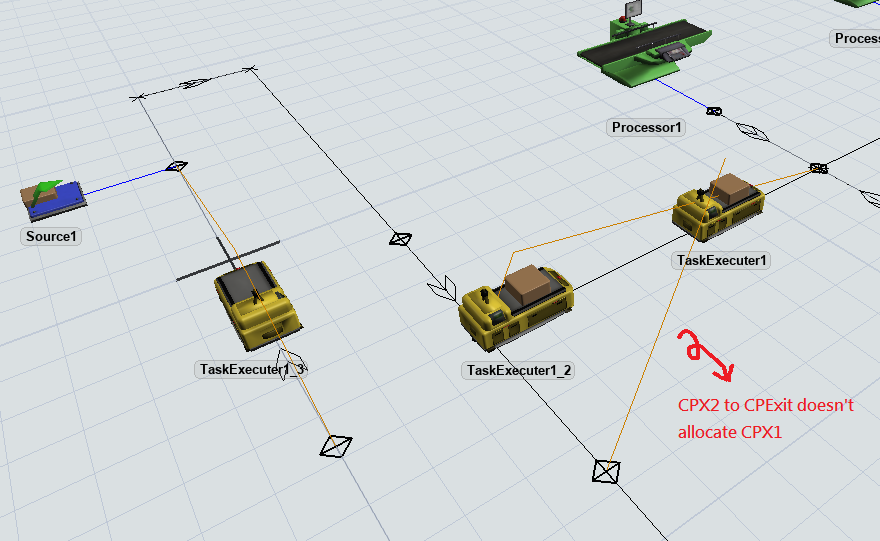
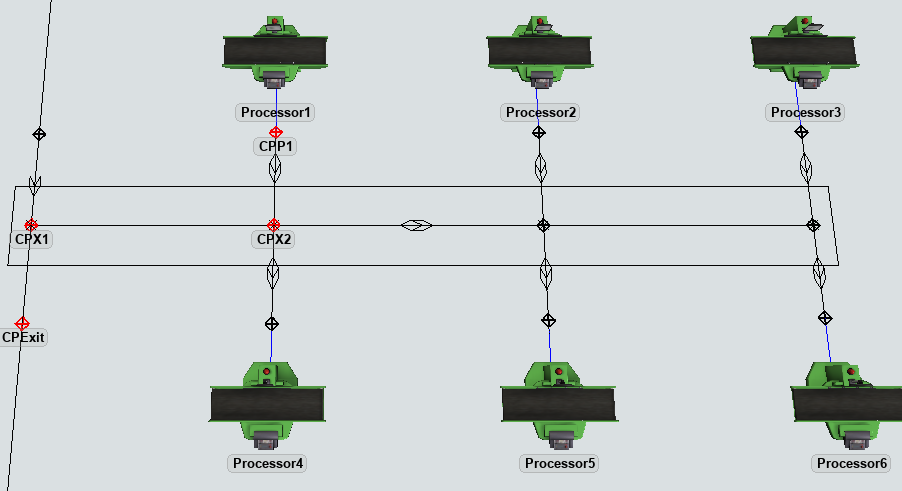
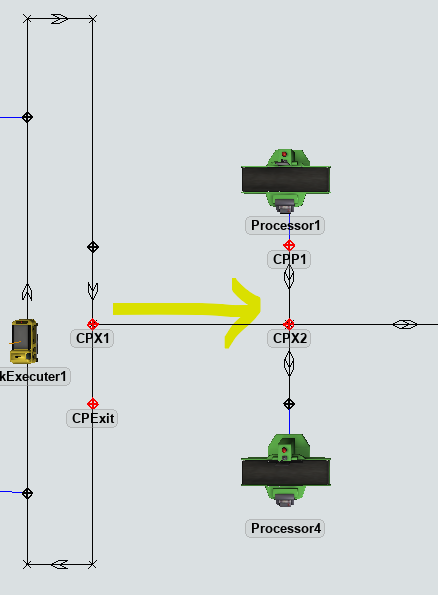
In the image below, AGV travels from CPX1 to CPX2, I expect the AGV may enter path to CPX2, but it go CPExit instead and travel around back to transfer cluster under CPX1, then CPX2.
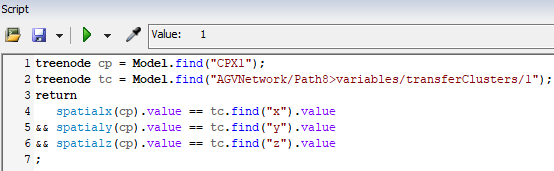
I am sure that locations of CPX1 and the transfer cluster are eqaul.