a star can call car?
FlexSim 20.0.10
Could you post a google translate version of your posts each time as many those supporting here are not fluent in many languages? Thank you.
Hello
@mark zhen, This question seems to be answered and your requests shifted to another question you posted. Can we accept this answer and close it out? If you have questions about your other post then continue it on the respective post.
When you pull the AGV pass in something in the 3D space as the puller to act as the distance reference and enter ORDER BY distance in the Query section of the pull activity.
I mean I need to use these two points as my parking point, how should I change it if I use the astar way
Those are just objects so can be put on a list, used as resources and set as travel destination just like any other objects.
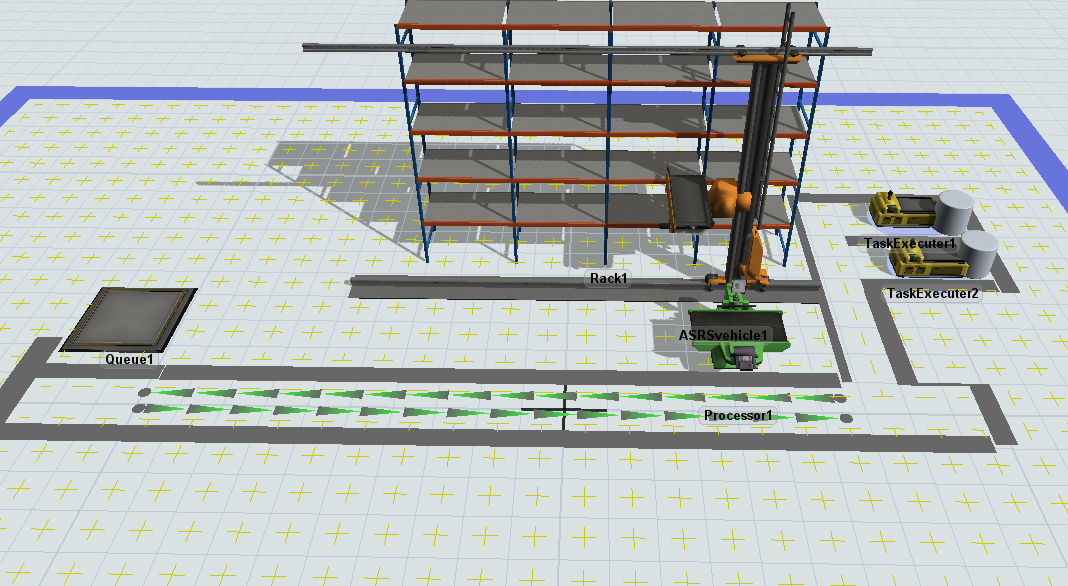
I have several problems now. The AGV will not load the goods smoothly, nor will it follow my process smoothly, and my ASRS does not seem to execute smoothly.
And how do I adjust my model if I need him to grab it all the time
What do you mean by things not happening "smoothly"?
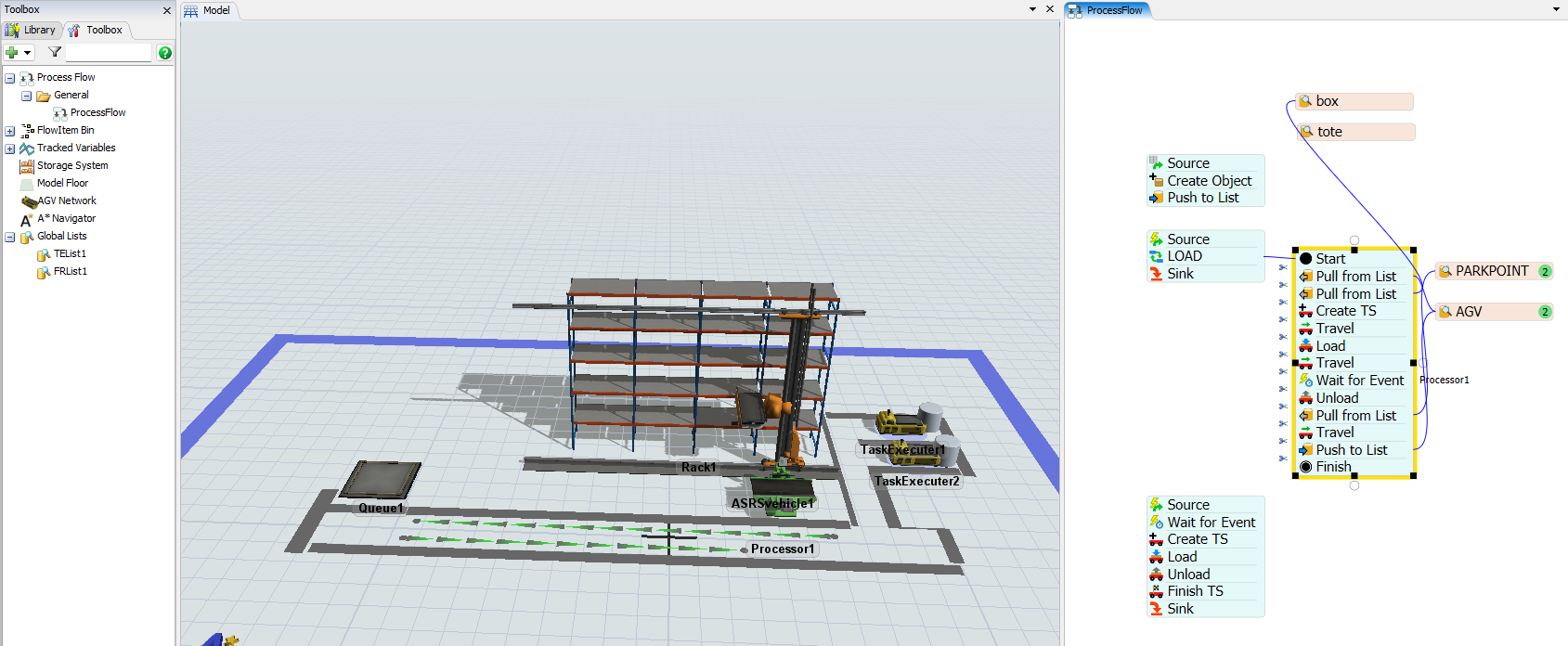
What I can see in your model is that the tasks for the ASRS are triggered twice; once by the event-triggered source when the item enters the processor and once as a subflow of the 'main'-token. The Run Sub Flow activity should probably be the one to be removed.
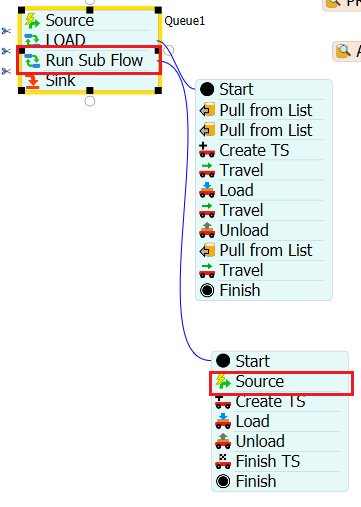
To have the logic work continuously, you have to push the AGV and parking points back onto the list after they are no longer needed. Otherwise any further tokens can't pull anything from those lists.
The parking point list should also be set up as a 'FRList', because the 'distance' expression of a TSList is different from that of the FRList and doesn't work when the values on the list are not task sequences.
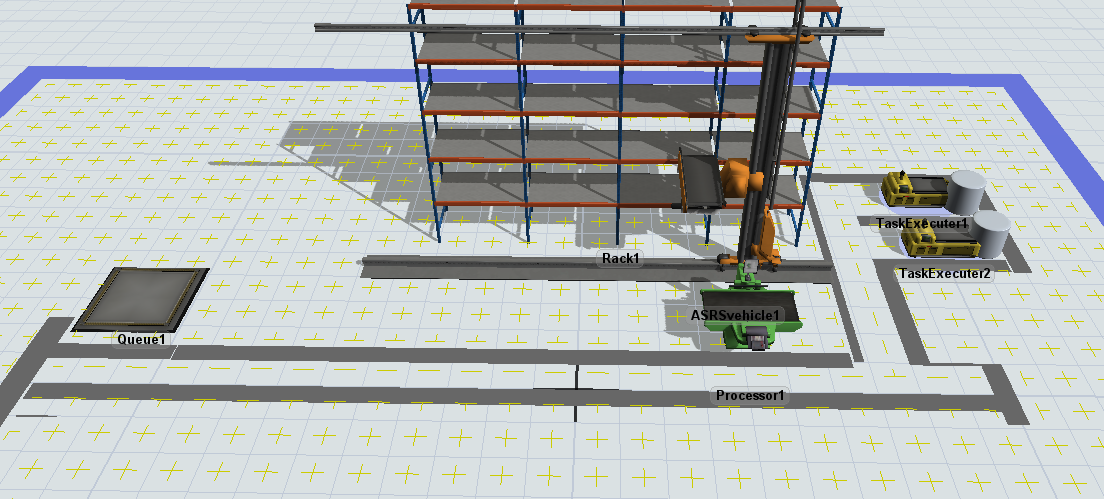
Hi! Thanks for the suggestion but I now want to utilize a* different functions to complete the model, my current model is as follows
I would like to ask if a* can complete the car avoidance activity in this case? Or is there another way to solve the car avoidance
and in the case of parking, a* will be automatically assigned to the nearest location, but I have to limit his parking capacity how can I adjust

Your hallway is too narrow. There is only enough space for one node down the hallway. If you widen it then you wont have this problem. You can add preferred paths so that the AGV's travel down specific sides of the hallway depending on which direction they are traveling.
Hello @mark zhen,
Before asking a new question, I suggest you update your model with the solutions that have been provided.
@Felix Möhlmann and @Jason Lightfoot suggested to you several things that would completely fix your model. Please take the time to try and implement them.
Hello, I know that my path is too narrow, but the situation I want to discuss is how a* will avoid the car in the case of narrow roads, will it automatically find vacancies? Or is there any better way
The A* system only allocates the next cell/grid point ahead. So a conflict with a second task executer will only be noticed when they are already adjacent to each other.
You would have to acquire/reserve the entire narrow path similar to how a control area of the AGV network works.
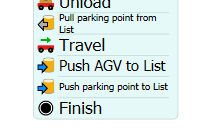
In this model the logic might work like this:
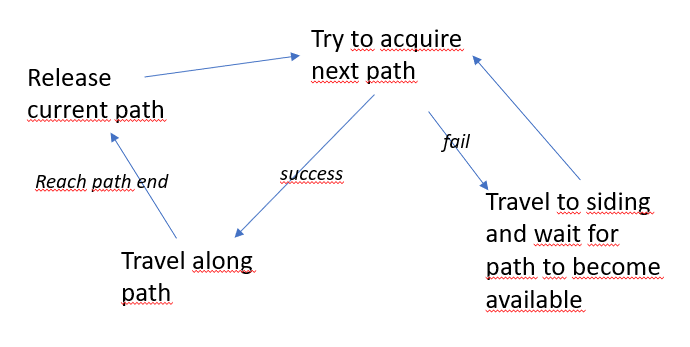
The paths could be dummy objects, attached to the process flow as a resource. Or represented by tokens that are pulled/pushed from/to a list.
So in this very narrow path situation a* can't assist in the situation of meeting cars? Or can it only be done using path
No, A* has no build in logic to handle cases like this. If a traveller becomes blocked for a certain it tries to find a new path, which will fail in this case and results in the behaviour you see in your model.
ok i have another question to ask you, can you see my latest question? (I set it as private question)
No, I cannot see private questions. I work for a distributor and don't have the necessary authorization.
Understand that I want to add a* to this model but I just try to add my profile I get an error and I can't save it, is there a way to fix it?astat 0726.fsm
Sorry, I don't know what is causing the error. You might have to wait for answer from a developer.
Do you have previous versions of the model you could go back to? To see if the error happens there too or only in this version.
This problem happens as long as I add a* to this model, no matter if I put the barrier on it first..
No, any task executer will only occupy a single grid cell regardless of its size.
了解,另外之前我們有討論過關於COLLISION的問題,我嘗試把兩個模型合併再一起,但他會有問題產生,那根據錯誤的代碼它顯示是在CODE產生了問題
我目前沒有辦法上傳檔案。

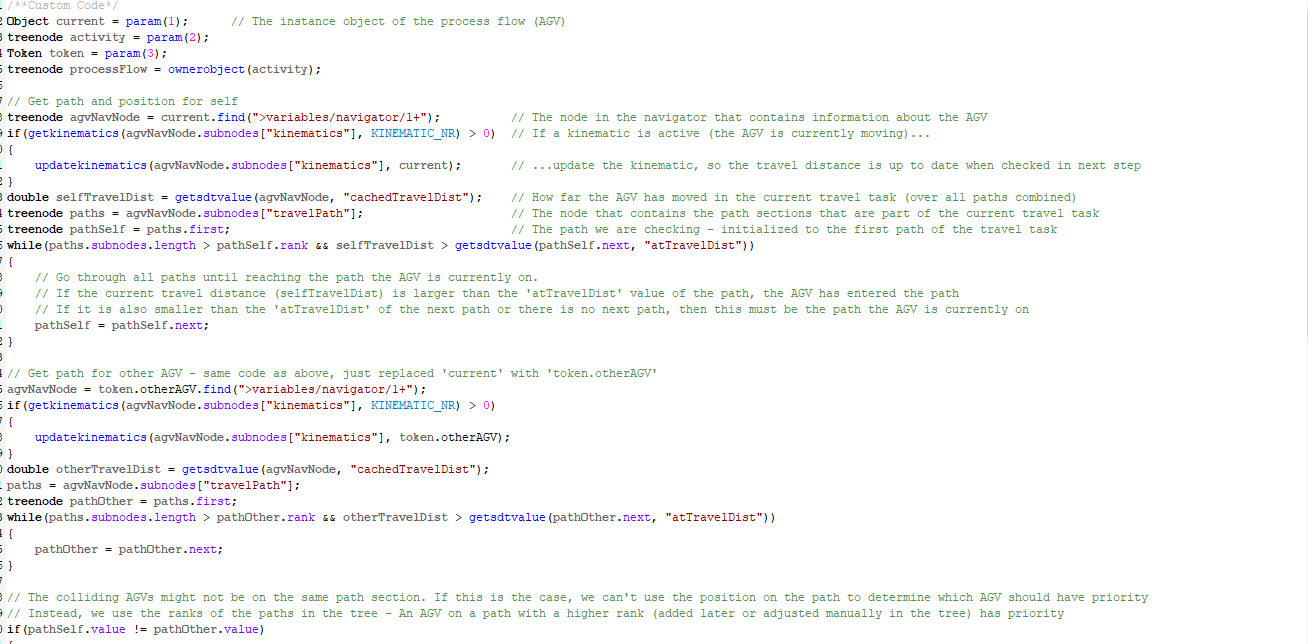
Is the process flow the activity is in an instance of an AGV? Because the code assumes that 'current' refers to an AGV.
If notm you could check where the error lies. Add a debug break to the code. This will stop the model once the code reaches that line and allow you to step through the code line by line.
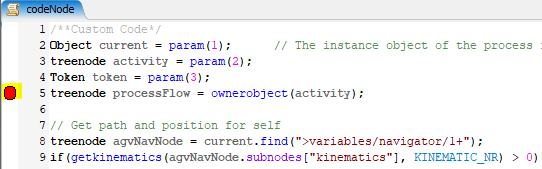
Based on the error, some variable should appear as 'null'. When you find out which one, you can maybe find the reason or at least provide that as additional information.
https://drive.google.com/file/d/1wMTZ0bhLJGFp_OFS4vvkCTX4QCQ9JBeZ/view?usp=sharing我無法在這個網頁上上傳任何檔案,
那我這個模特很簡單的將一個*簡單的檔案合作合作和討論,我無法在這個網頁上傳任何的檔案
You could try to add your model file to a .zip-file and upload that. It seems to be only files with the .fsm ending that have issues with the uploading.
FlexSim has set up a file sharing site that can be used until the upload issue is resolved. Could you upload your model there?

19 People are following this question.