Hi there,
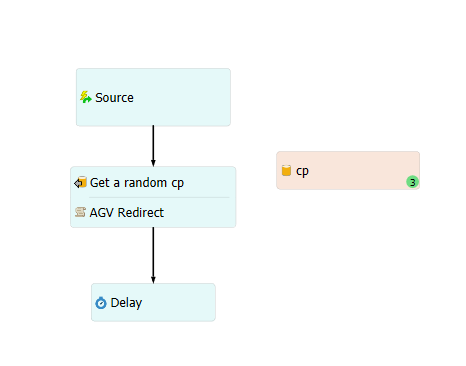
I want to let AGV choose a random path when it enters an intersection, instead of selecting the shortest route. I want to trigger this behavior when AGV enters the cp (ControlPoint_I1) before the intersection.
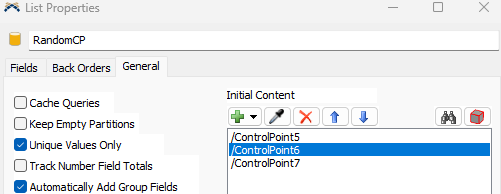
I duplicate the AGVWork list and create a RandomCP to save the control points (CP1, CP2, CP3), therefore I could pull random CP from the list using query, ORDER BY RAND()
But how could I save those cps into list?
I have created 2 models using different PF, I have no idea which is better to achieve my goal.
sample_using AGV PF.fsmsample_using general PF.fsm
Hope to get some suggestion, thanks!