Hi Everyone
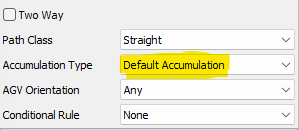
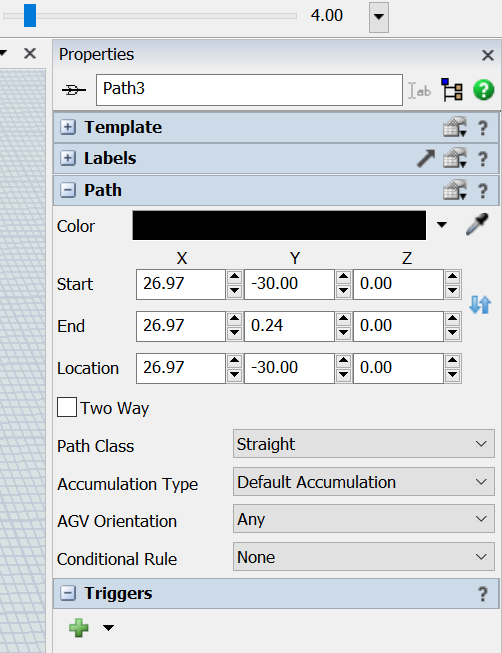
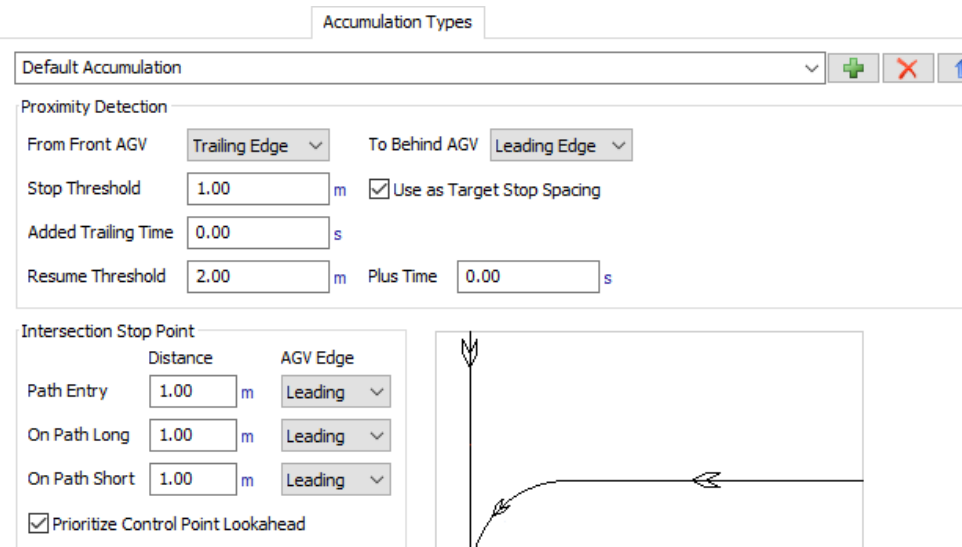
In my attached model. AGV will stop and wait for AGV on the path ahead of them to reach and past the control point its on. How to make this crushed avoidance logic more sensitive in which AGV will only stop when distance between it and AGV on the path ahead of them was less than 2 units long?
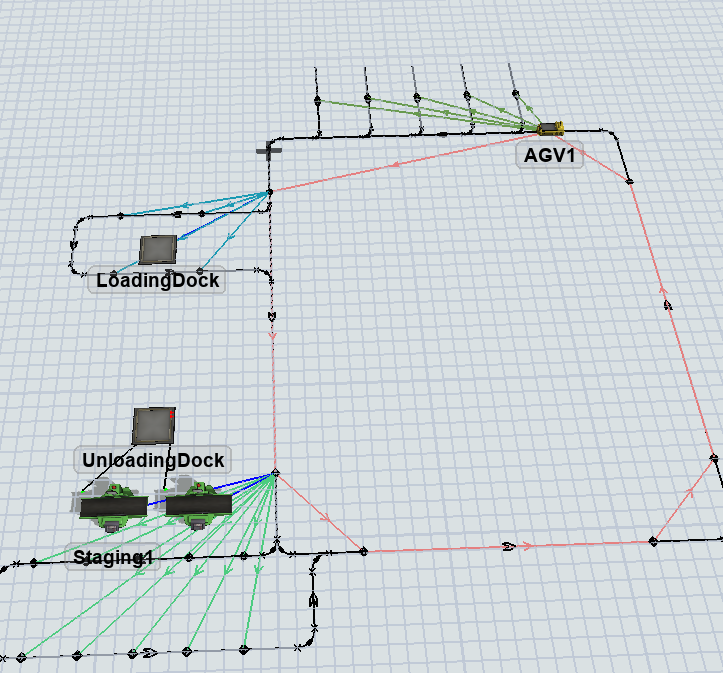
4.2 - AGVs Using Process Flow.fsm
Thanks and best regard!