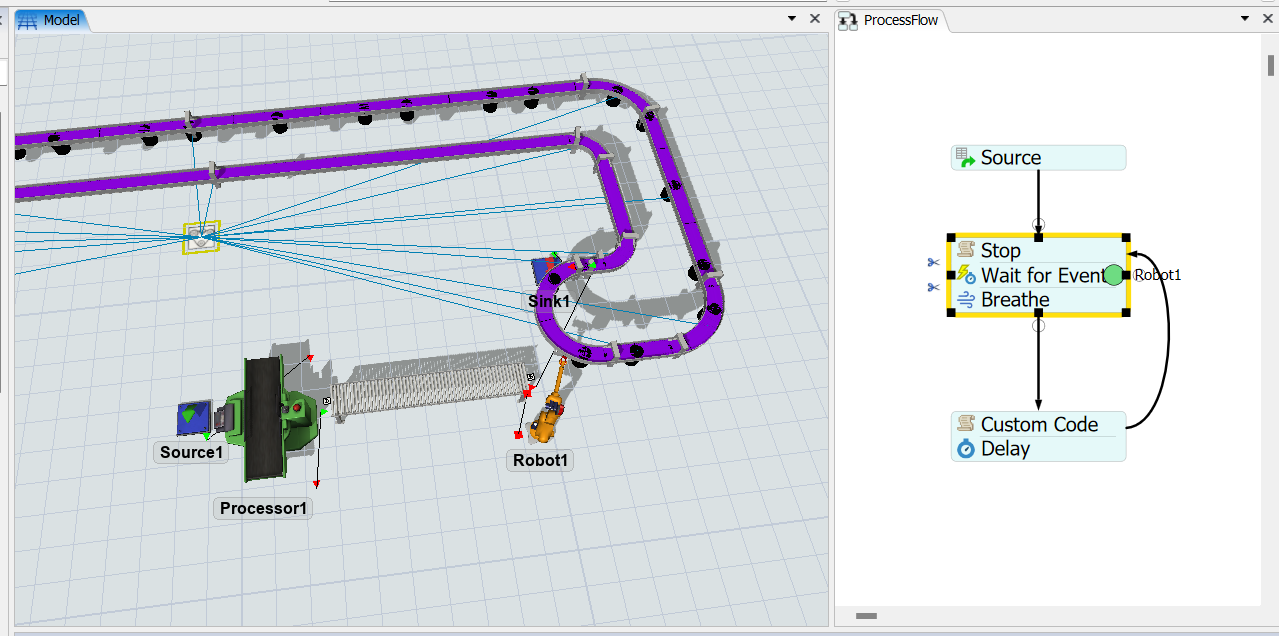
In a specific section of my production line, I have a monorail with a fixed number of hooks, and I'm simulating these hooks using intervals of 1-meter gap between the flow items using dog intervals. However, I'm encountering an issue where some hooks are free and not carrying an item. I want the monorail to wait for the "Dog" to be ready so that it doesn't miss any dog.
How can I ensure that the monorail waits for the "Dog" to be ready to maintain the desired intervals?
I want my model to do the same behavior as the picture.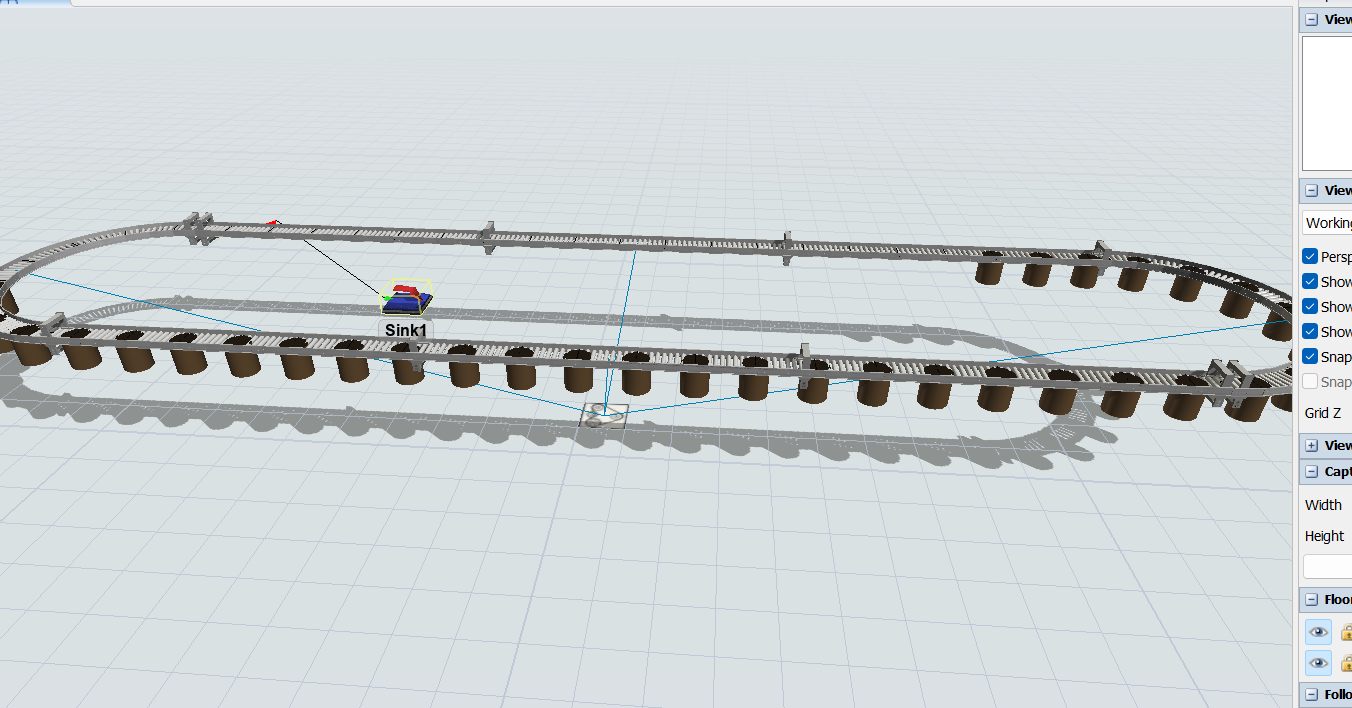
Motor Control_Dog Intervals.fsm