Hi,
During the simulation using the control point connection, I inquire because the path of AGV is not satisfactory.
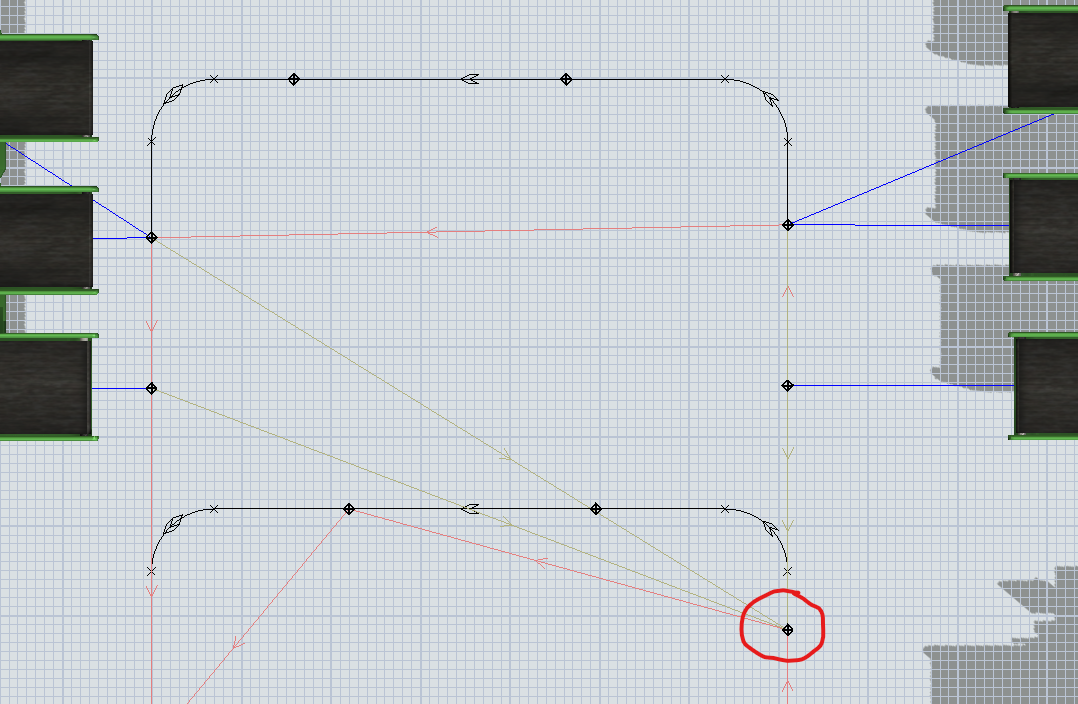
For example, the motion moving to load items from processors 24, 26, 27, 23 shows unnecessary detours to processor 9, 13, and 19 locations.
I don't want to look like this detour.
There are shortcuts in the area where the rest of the processors are located, except for processors 9,13,19, and I want to try using these shortcuts.
The control method used advanced AGV process flow and control point connection.
I'd really appreciate it if you could help me. Thank you