Hello, I'm new to FlexSim and I'm trying to make an AGV path. On the first point I want to load the box from the conveyor with a crane on to an AGV. It need to be unloaded from the AGV at the same point with the same crane but on the other conveyor belt. I really have no clue how I can do this.
First tip I want to give. If you've done the AGV Process Flow tutorial, so you know what the AGV template does, and you want to implement logic that is exactly that or very close to it (patrolling along a route looking for work), then use the template.
For anything else, build your own logic. You will learn more about the possibilities of Process Flow and it will ultimately also be easier quicker than trying to remodel the AGV template into something it wasn't designed to do. You can of course use parts of the template (like the parking logic) and reuse it in your own logic after adjusting it to work with the information and logic structure you are using.
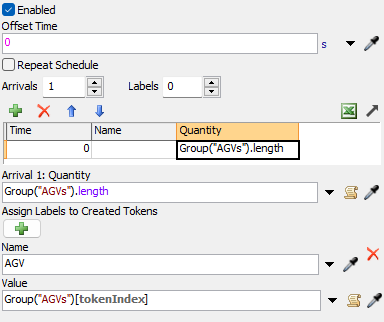
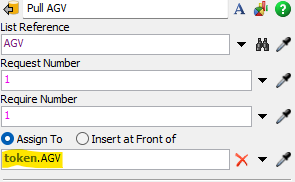
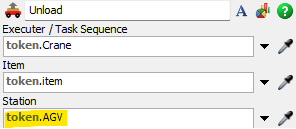
Now to the actual question. The important part here is that the two task executers (crane and AGV) need to be synchronized. The crane can't unload the item if the AGV is not in position to receive one. One option to do this is to use a list. A token can wait until it can pull the needed resource, in this case the AGV, from a list.
In order to be able to unload to a conveyor, an entry transfer must be used. You can create a new transfer by connecting some object to the conveyor and then delete the object. The entry transfer will remain. In the attached example, I added both entry transfers to the output conveyors to a group and choose a random one among them to unload the item to.
I also make the AGV do a round trip before the item is unloaded again, so it doesn't just stand at the CP all the item and to further demonstrate how tasks can be synchronized by having the "AGV-Token" control the unload task once it returns to the CP.
21 People are following this question.
