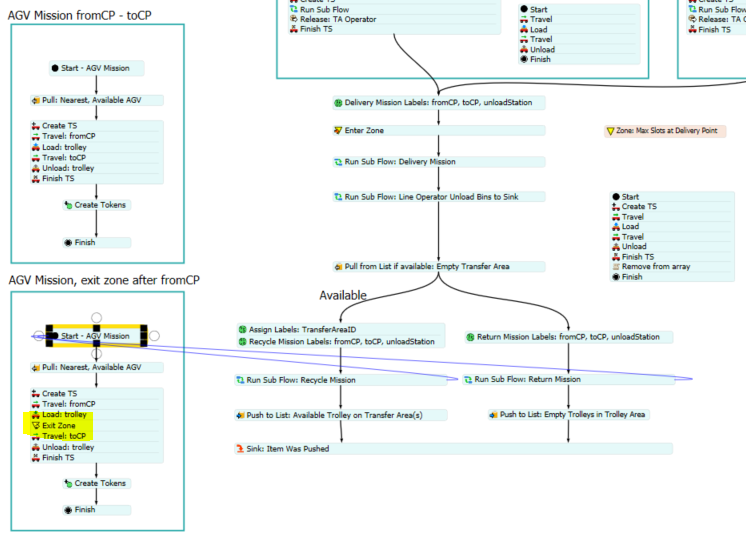
Hi All. I recently completed the logic for my simulation with the initial logic of my AGV to be a task executor with Task Sequences. After completing the logic for the part flow within my simulation i would like now to incorporate the Advance AGV function into my model. From flexsim tutorial on agv i assume that i am able to do this easily by the following: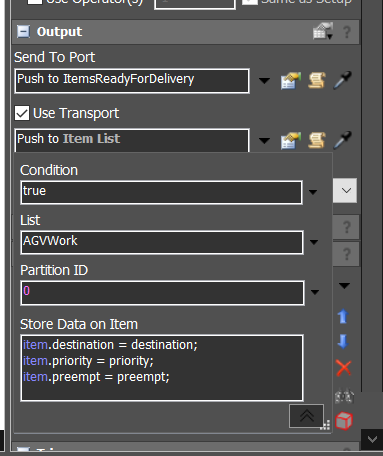
however when i do that on my current sim model it doesnt work. is there any way/tutorial for me to incorparate AGV advance process flow into my task sequence?
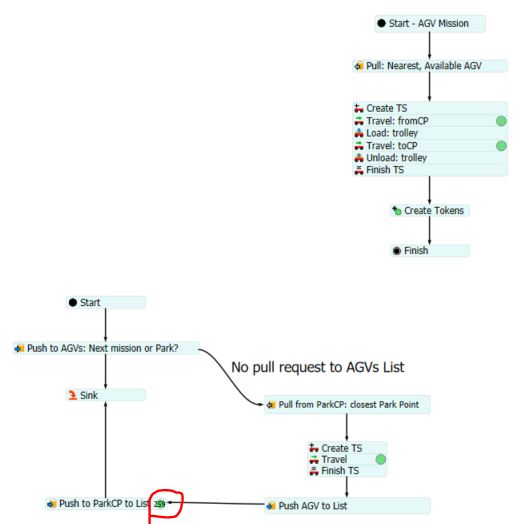
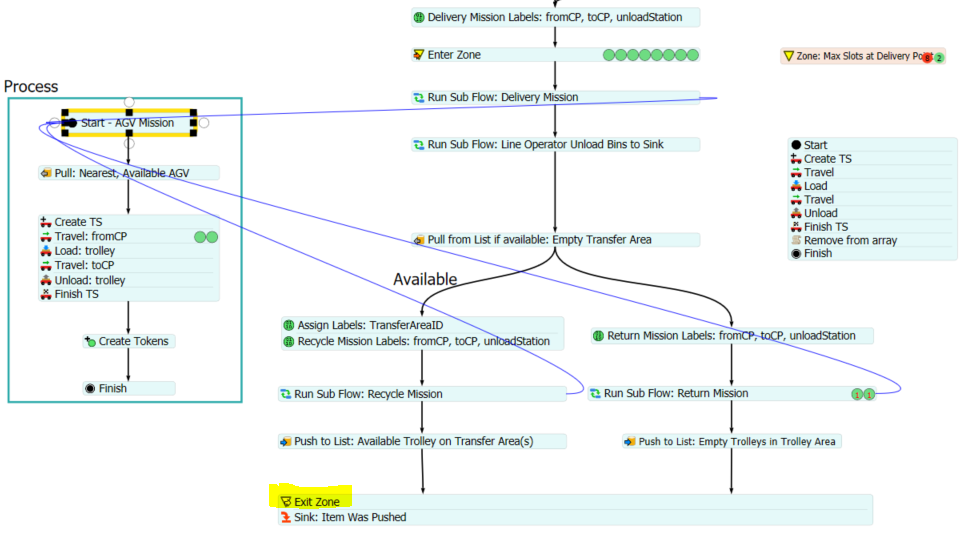
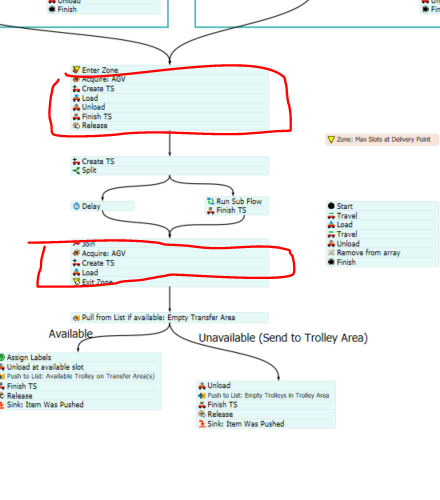
the pick up destination, and the deliveray destination have already been define in my mai process flow, how do i replace the red parts below with Advance AGV process flow?
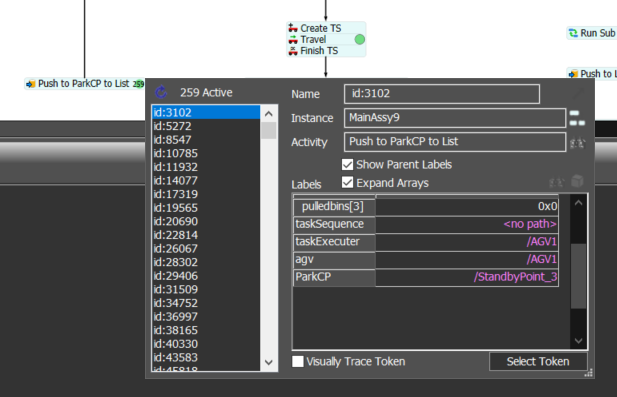
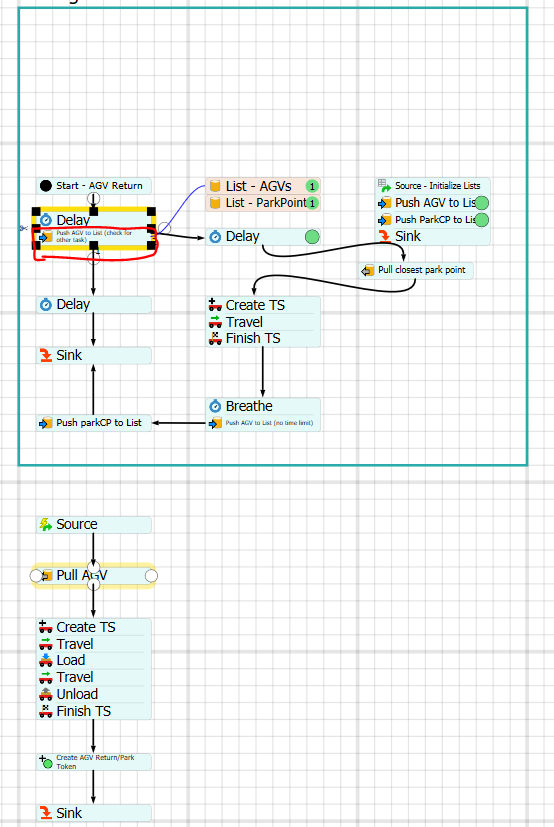 the activity " Push AGV to List (check for other task)" how is it checking for other task?
the activity " Push AGV to List (check for other task)" how is it checking for other task?