Polishing Simulation R0.fsm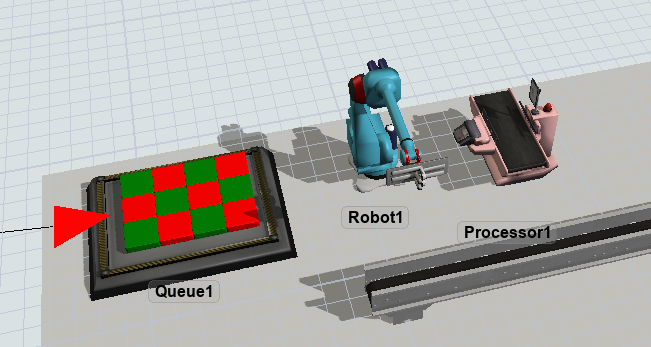
Hi I am simulating a robot to pick up a flowitem, and hold it near to processer 1 for a polishing process. Throughout the polishing process, the robot is still holding on to the part that is processing. there are 2 types of flowitems to be polished, type 1 and 2. type 1 has a polishing process time of 26s while type 2 has a polishing process time of 27s. The flowitem is then unloaded on the conveyor.
the loading time (time for robot to pick up and move towards processor 1) of type 1 varies from 8-12s depending on where it is located in the queue, while the loading time of type 2 varies from 10-14s. the unloading time to the conveyor after process is done at processor is 6s for type 1 and 8s for type 2. how could i easily simulate this with the robot and processor here?
How do i work with robots in simulation with only time inputs for robot?
FlexSim 23.1.4
I'd suggest to build a Process Flow that controls the movement of the robot. Ahead of each move, set the move time depending on the item type.
11 People are following this question.