I am modeling a ceiling mounted robot arm in my model but when I flip the orientation of the robot, the arm does not travel to where it is supposed to. It is like it does not know it is upside down and it ends up picking objects out of the sky and bringing them to the wrong location. How can I flip the robot's reference frame? I've attached the model with the problem.
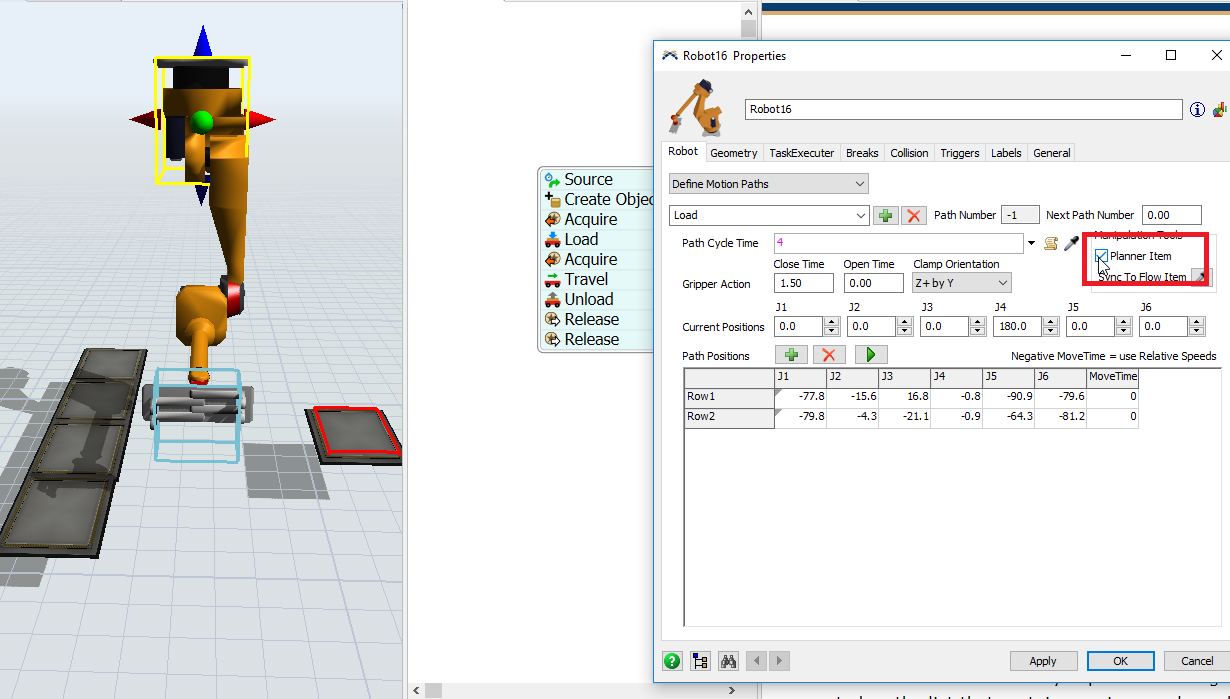
Using the planner item, it's relatively easy to set paths for everything you need. Here's your model with updated motion paths. Let me know if this helps!
8 People are following this question.

{kind=link}