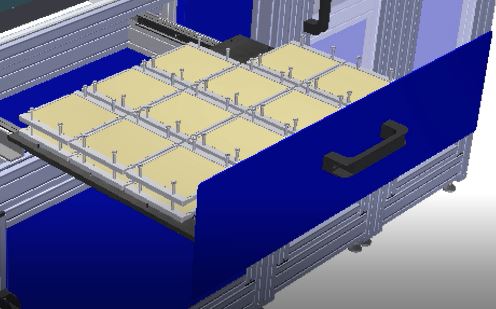
I need help with creating a similar loading pattern (attached jpg file - 22 pallets in 2 layers and 1 empty space for unloading) on Queue (Loading_Station) when simulation begins, and avoid the standard functionality of movement of pallet (objects/parts) on Queue. Robot should pick the available pallet for processing and place the completed pallet on empty location or on top of completed pallet.
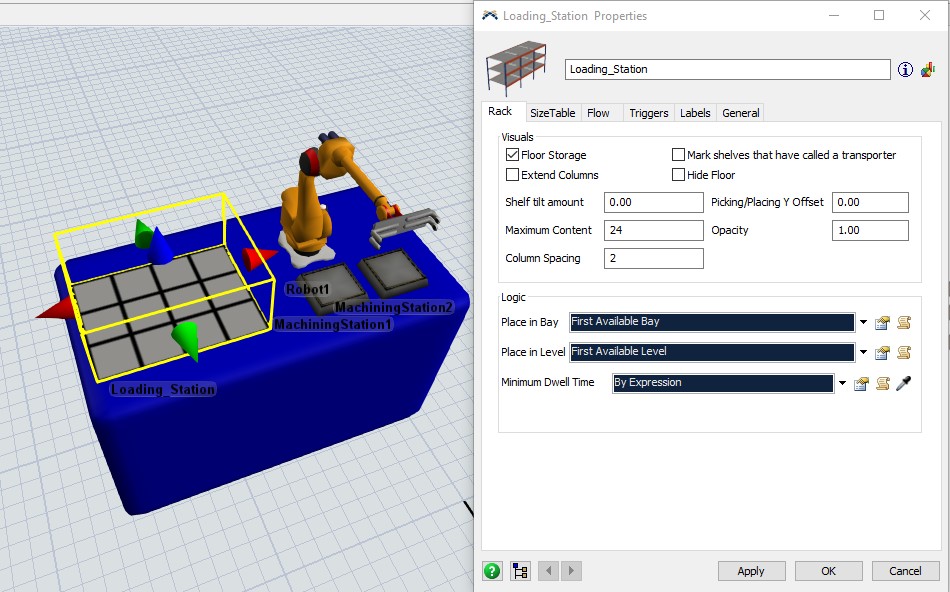
To do something like that I would use a floor storage rack instead of queues. In the attached example the Loading_Station Queue has been replaced with a rack with the Floor Storage property checked and the Place in bay & Place in Level triggers set to "First Available". The max Cell Content is set to 2 so there can be two stacked pallets in each cell for a Maximum Content of 24.
I have then created a global ItemList with a Cellcontent field that tells me how many pallets are in the current pallets cell, and a CellRank field that tells me the rank of the pallet in that cell. When a pallet enters the Loading_Station I have set the on entry trigger to push the pallet to my Items list.
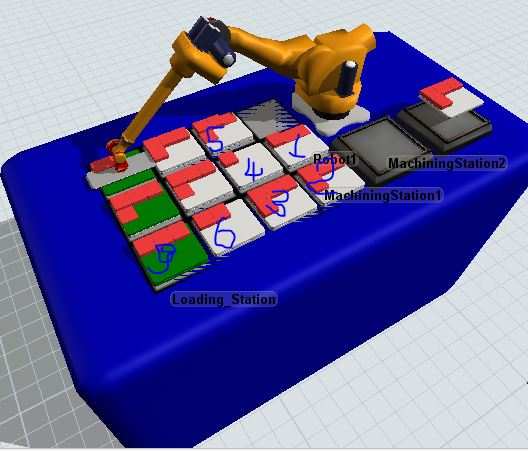
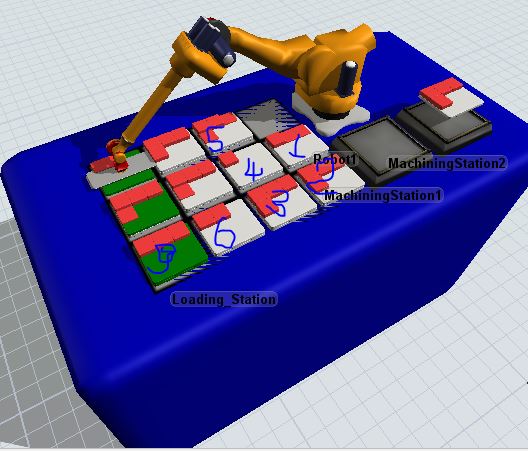
The flow still creates 22 tokens and each of them creates a pallet, which is added to the rack and subsequently to the list. The token then continues to the process where it pulls a different pallet than it initially created from the list. The two fields help us choose the correct pallet rather than just a random one. We want a pallet on to of its cell and then the one beneath.
Finally I have added a SetLabels activity "Update Labels on Pallet" that will set the phase label to 2 to signify that the pallet has been processed. In the on entry trigger where I push the pallet to list I set the condition that pallet.phase != 2 to ensure that we dont reprocess finished pallets.
Please see the attached model: parallel-station.fsm
Your flow structure is very direct and simple, but if I were to create this logic I might prefer to create two flows in my process Flow. One that creates the pallets and adds them to the rack, and a separate one for the robot control. A single flow with a single token that loops through the robots processes would give you more control. Rather than the flow being item focused, it would become process focused.
5 People are following this question.

{kind=link}
{kind=link}
{kind=link}
{kind=link}