This question was asked before, but the solution did not help me.
I have a model of a closed path having 24 control points and 23 AGVs. the agv should stop at each CP for specified amount of time.
This question was asked before, but the solution did not help me.
I have a model of a closed path having 24 control points and 23 AGVs. the agv should stop at each CP for specified amount of time.
You can do this by adding way points. A way point is created by:
Click on the AGV network path
Click on AGV network properties
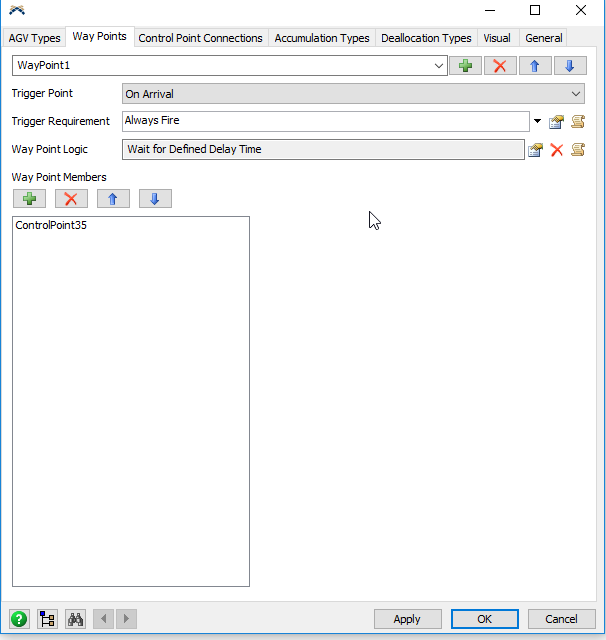
Click on Way Points Tab
Add a way point using the sampler and clicking on a control point on the AGV network
Change Trigger Point to "On Arrival"
Change Trigger Requirement to "Always Fire"
Change Way Point Logic to "Wait for Defined Delay Time"
Then to make the AGV continue to the next control point:
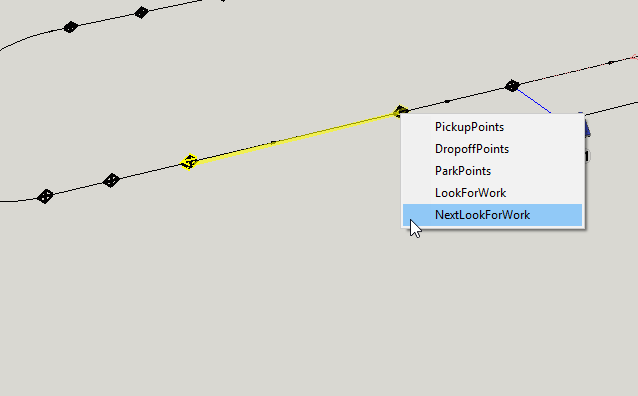
Add "Redirect via Direct Reference" (Make sure to connect the control points with "NextLookForWork")
You can direct the AGV to continue to the next way point by adding "Redirect via Direct Reference." Make sure to add more way points for each control point in the AGV network

13 People are following this question.
FlexSim can help you understand and improve any system or process. Transform your existing data into accurate predictions.
FlexSim is a fully 3D simulation software environment. FlexSim can be used to simulate any process in any industry.
FlexSim®, FlexSim Healthcare™, Problem Solved.®, the FlexSim logo, the FlexSim X-mark, and the FlexSim Healthcare logo with stylized Caduceus mark are trademarks of FlexSim Software Products, Inc. All rights reserved.
May we collect and use your data?
Learn more about the Third Party Services we use and our Privacy Statement.May we collect and use your data to tailor your experience?
Explore the benefits of a customized experience by managing your privacy settings for this site or visit our Privacy Statement to learn more about your options.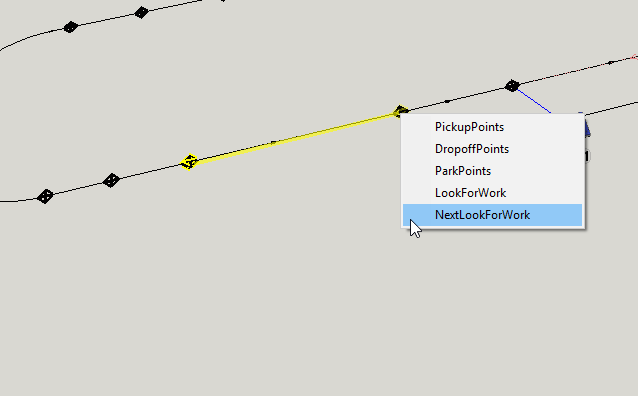

{kind=link}