I attached a simple model using network nodes and AGV network. How do I get the AGV using the AGV network to stop in front of every bay like it is in the network node example in the attached model
AGV Network and Rack Picking
FlexSim 19.2.3
The logic of Network Nodes and AGV paths are different. I'm not sure if it would be very easy to get the AGV to to behave like the Network Node example. My first thought would be assigning each Control Point a Bay value. Then, when an AGV picks up an item, look at which Bay the item is assigned to, acquire the CP associated with that bay, and travel to that CP to unload. Any reason why you can't use Network Nodes in your model?
Hi @Jason P2,
How many racks are in your model? If there are relativly few, it may be easier to break each Bay up into a separate rack and connect each rack to an AGV CP. Otherwise, we may need to look at some serious custom collision code to get it to work with the network nodes.
Hello, i was trying make a model like KIVA which is AGV carrying the Racks and i went through your Flexsim. May i ask how did you add rack in Flow item bin?
@용훈 , Please ask your question in a new thread! The Headline and the question here has not much relation to your request. Many Thanks!
Hi @Jason P2,
I've created a reasonable working model that demonstrates how this can be modeled with AGVs. I would still suggest looking into the new Warehousing feature, which makes it possible to designate slot locations, or Benjamin's suggestion of separating out the bays to be individual racks. The model I created is rather convoluted and may end up causing confusion as more racks and AGVs are added.
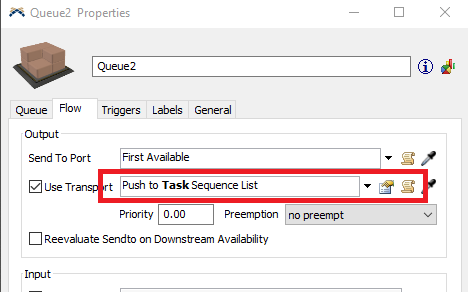
In the example model, the Queue is sending the items to the rack as soon as they become available, but it's using a Task Sequence list to handle the transportation.
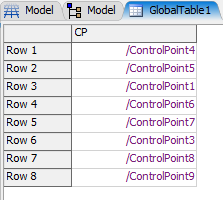
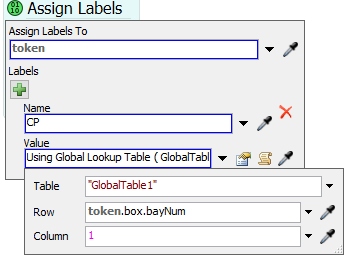
A label is used to identify which of the bays the item was sent to and which control point that corresponds with using a Global Table:
The Process Flow pulls a task from the list, acquires an AGV, and then begins to dispatch the task sequence. This is interrupted by the Wait for Event activity that fires upon the AGV's loading an item.
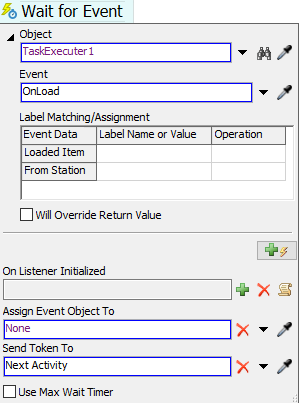
The token then stops the task sequence during its execution and starts a new task of traveling to and unloading at the CP that was assigned using a label from the aforementioned table.
The AGV will now unload at the Control Point that is closest to the bay that an item is assigned to. Here's the working model. It might not be the most efficient way to do this, but there's not any easier ways that I could come up with. Let me know if you'd like an explanation on anything in this model.
12 People are following this question.

{kind=link}