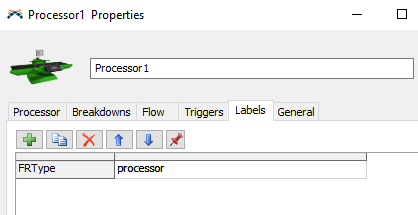
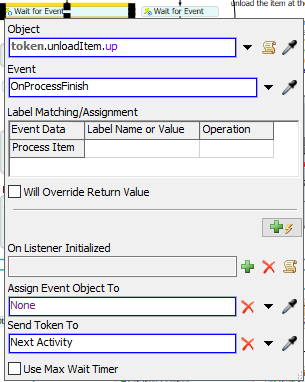
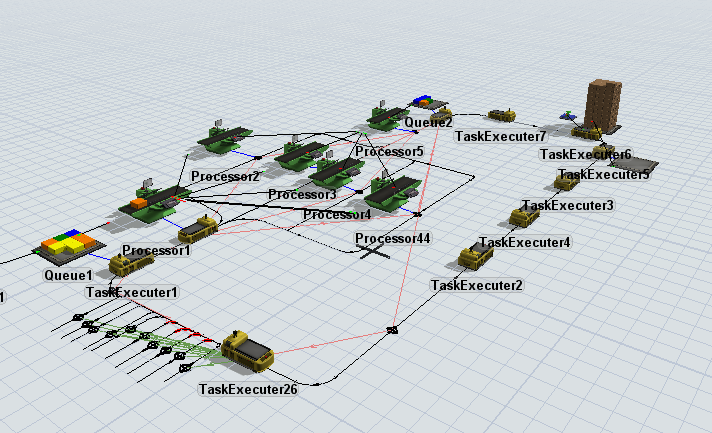
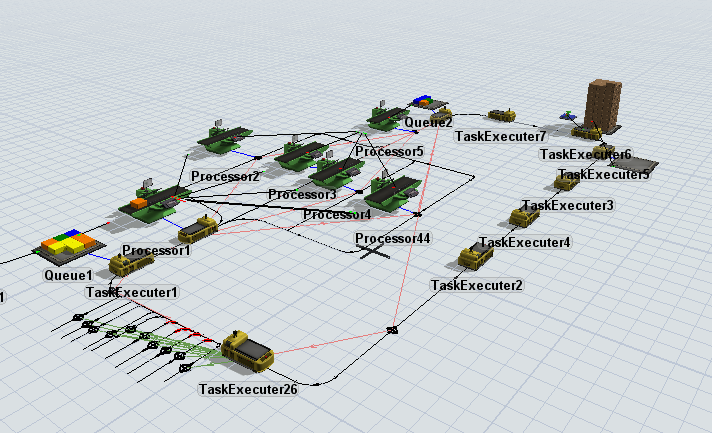
After unloading an iteam at the processor, the AGV should wait until the process is finished and load this finished item. I use the "stock" AGV flowchart, but I have no idea how to stop the AGV. After unloading, the AGV travelles automaticlly to the next controll point.
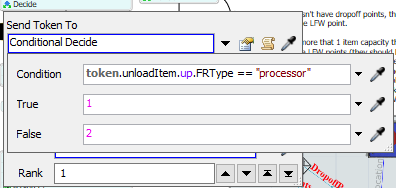
How do I implement a wait before the AGV loads the finished item?
{kind=link}
{kind=link}