Using the On Message trigger,
Can global table values be applied to robot joint angles?
robot joint angle by global table
FlexSim 19.0.0
Perhaps you look into the properties of the robot first. Test some of the options. Perhaps you take a look into the manual robot and robot motion path.
Then you open the model tree and investigate the structure of the robot.
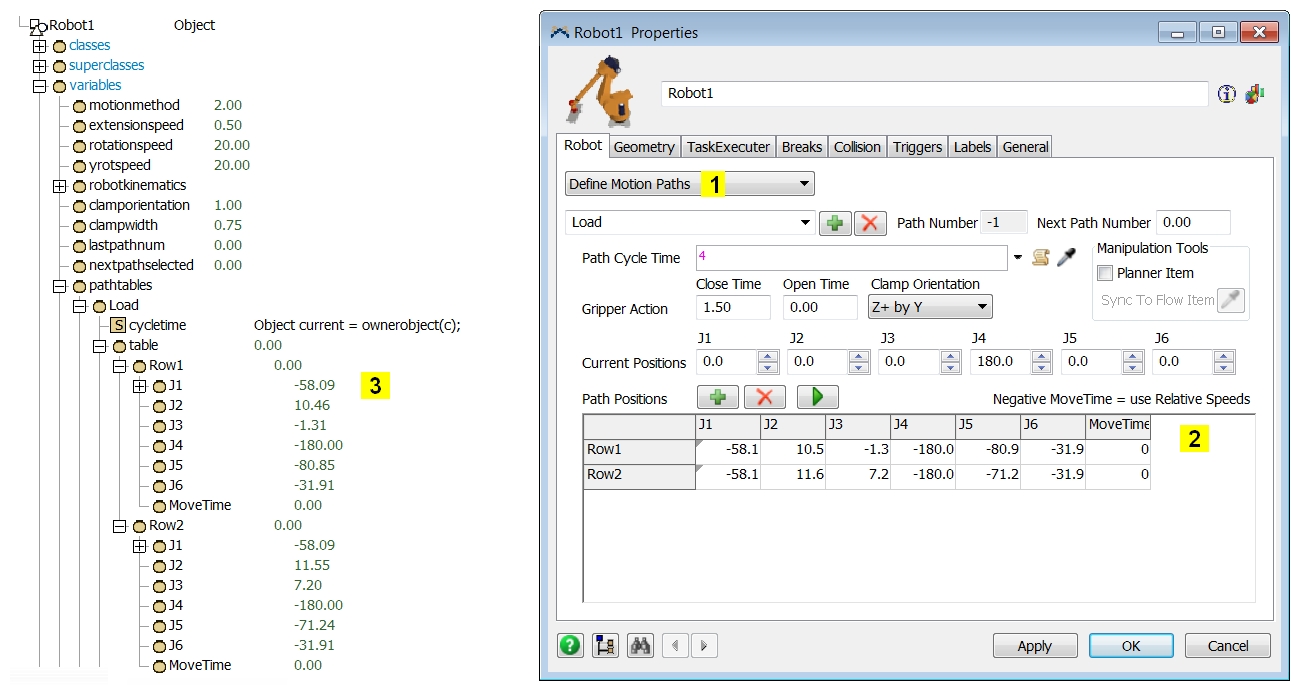
You can adjust the path planing mode (1). You can have different paths for load, unload or other tasks: option blow (1)
If you choose Define Motion Path, then you modify the values for each path point by joint values. If you need more points you add them in (2).
If you want to adjust the table values by another global table, you can set the values of path tables by source code. (3) lists the structure of the path tables in the tree.
12 People are following this question.
