Hello.
I'm trying to make agv system by modifying the process flow.
And, I am having a hard time making intersection logic.
I want to make it like the description below. I would be grateful if you give me a good comment on how to make it. Thanks in advance
To get to the point,
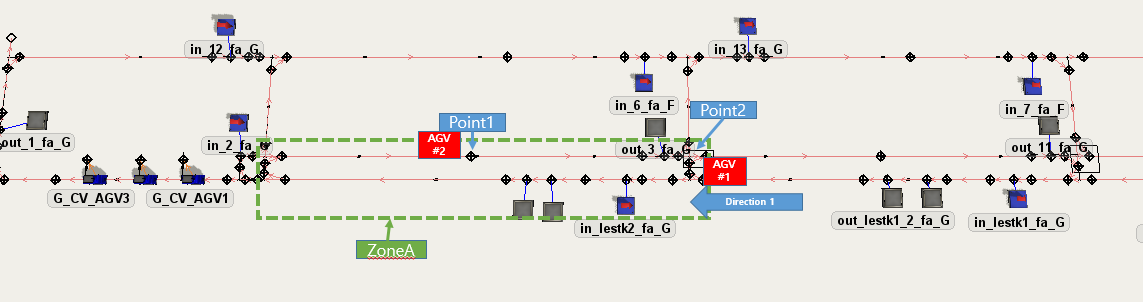
When an event occurs, the entrance to AGV # 1 that entered in 1 Direction is blocked.
After that, AGV # 2 arriving at 1 moves to 2 through the bypass and then resumes 1Direction AGV # 1.
(Please trigger the event at random)
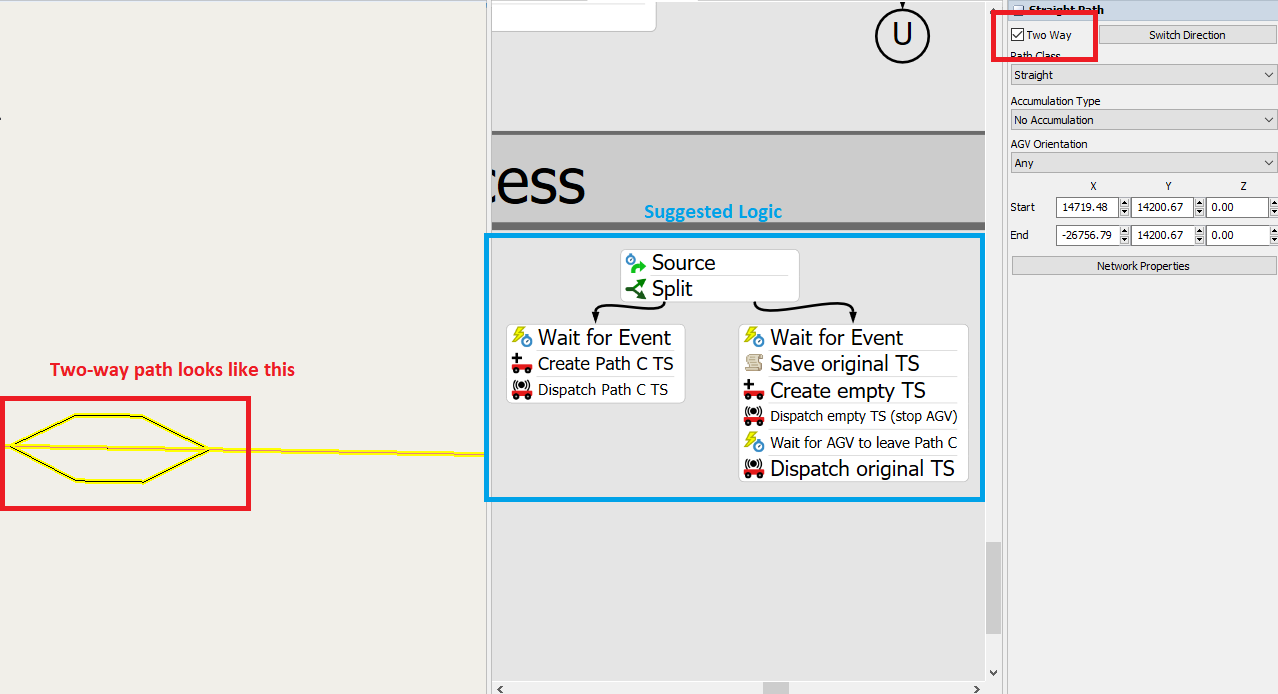
 And, I want to create the logic in the A zone(image-2) in the attached file.
And, I want to create the logic in the A zone(image-2) in the attached file.
{kind=link}
{kind=link}