pick and sort robot.fsmGood evening, I wonder anyone can help me with the topic issue stated above. The current problem right now is when I use a photoeye-sensor to trigger (on blocked) to stop the motor and (on clear) to resume the motor, my robot1 would be in idle status and would not work. I would require some form of sensor to detect the boxes and then utilise a robot arm to sort them out according to their colors. However, when I try to remove the photoeye-sensor and utilise the onexit trigger on the conveyor belt, the robot is able to pick and place the boxes based on certain position. How do I actually sort them based on the above requirements I mentioned? And also if possible, how do I do fulfill this requirement of mine with the use of process flow? I am new to this software and requires help!
FlexSim Robot to pick and sort boxes of different colors (Urgent, any help?)
FlexSim 20.0.8
FlexSim 20.2.2
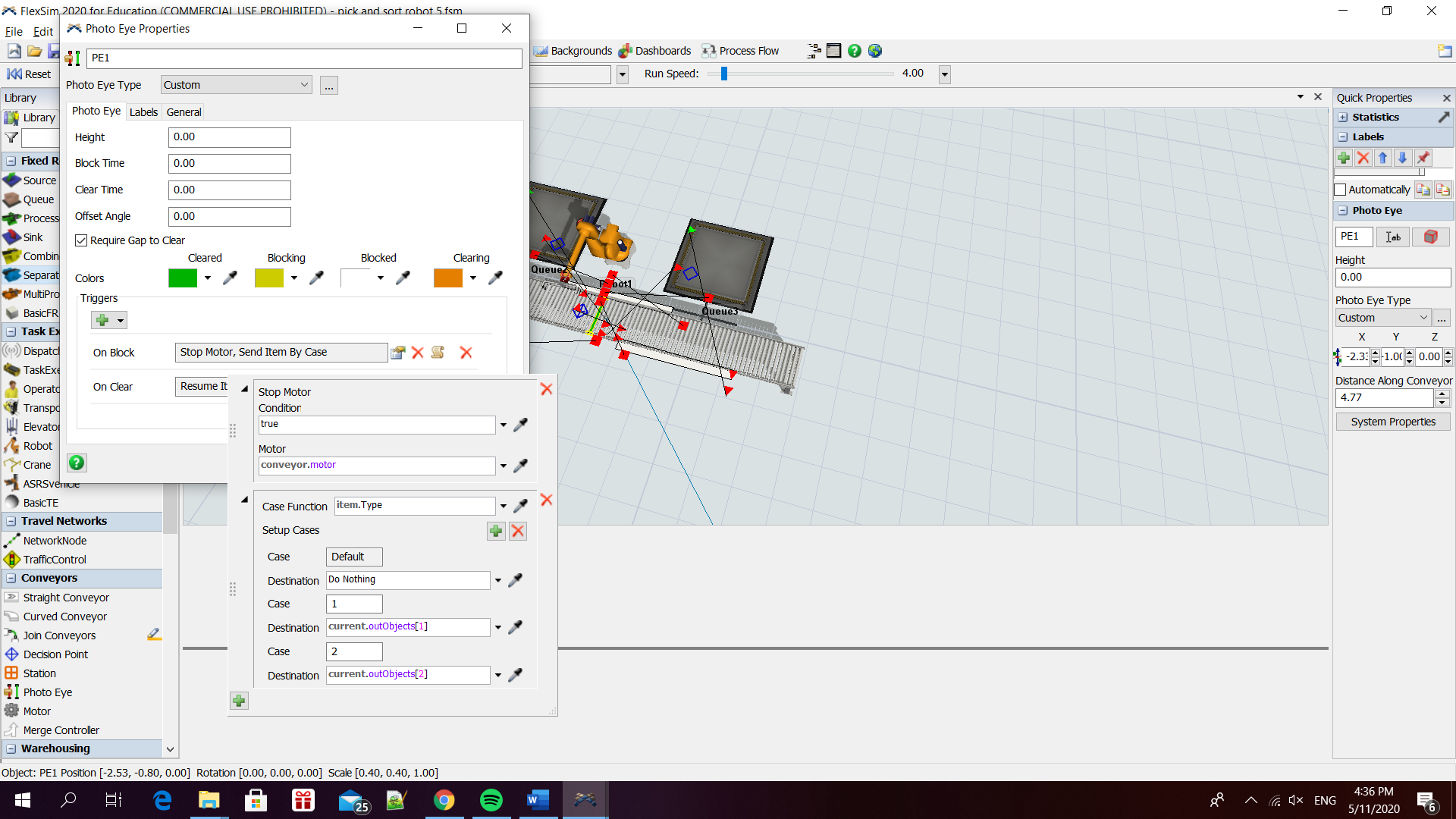
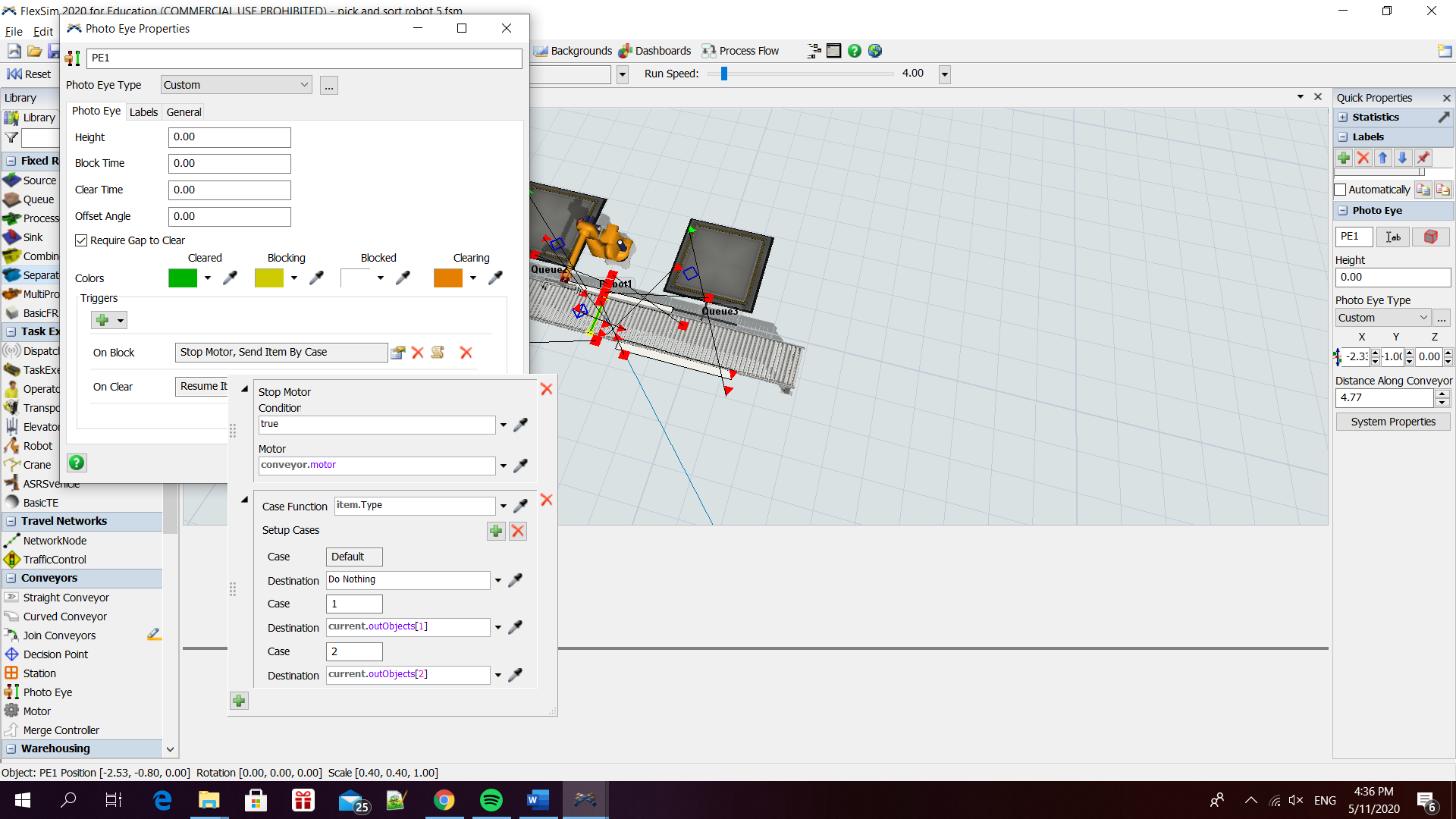
- PE > Trigger on Block or any other: Picklist Template "Send Item By case". Add cases for output connections 1 and 2.
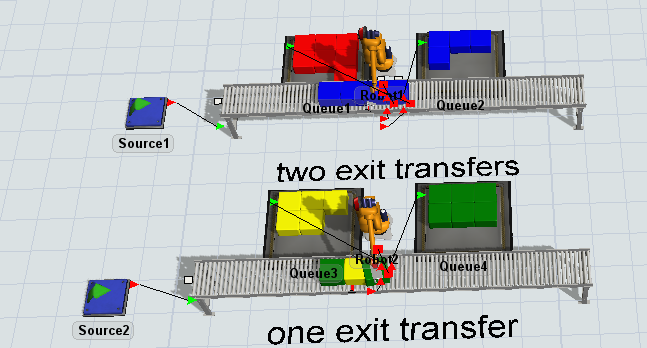
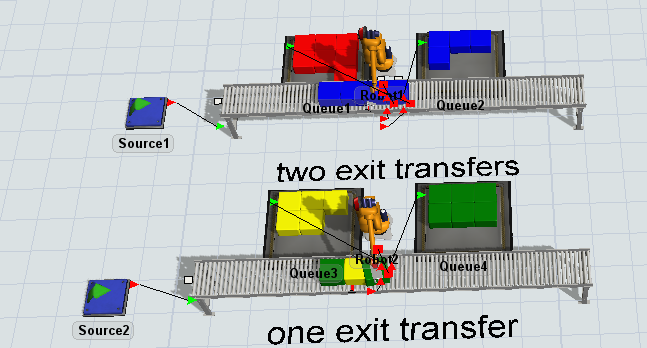
- Create another Exit Transfer to the other Queue
- Connect the Photo Eye with the new Exit Transfer by an Object Connect (A). It is another output port.
- Set Parameters of this Exit Transfer accordingly to the first, like Use Transport and set a center port connection to the robot, too.
A personal hint for Robot properties: Use Simple Motion Method before you are going to adjust the path points on your own.
11 People are following this question.

{kind=link}
{kind=link}