pick and sort robot.fsmGood evening, I wonder anyone can help me with the topic issue stated above. The current problem right now is when I use a photoeye-sensor to trigger (on blocked) to stop the motor and (on clear) to resume the motor, my robot1 would be in idle status and would not work. I would require some form of sensor to detect the boxes and then utilise a robot arm to sort them out according to their colors. However, when I try to remove the photoeye-sensor and utilise the onexit trigger on the conveyor belt, the robot is able to pick and place the boxes based on certain position. How do I actually sort them based on the above requirements I mentioned? And also if possible, how do I do fulfill this requirement of mine with the use of process flow? I am new to this software and requires help!
FlexSim Robot to pick and sort boxes of different colors (Urgent, any help?)
FlexSim 20.0.8
FlexSim 20.2.2
Updated: I have managed to increase the exit-transfer limit so that the transponder (robot) manage to detect an object and is able to incorporate the use of the photoeye-sensor to stop the motor and transport the object. My next question is how do I actually sort them out ( the red boxes into queue2 and the green boxes into queue because right now the issue is that: the boxes just keep going into the queue with higher ranking ( I guess I have to put some sort of priority but I don't know how to do so!), is there also a better representation to place them in instead of queue? Also Need help with the process flow for this logic if it is possible to do one. Can anyone help me? pick and sort robot.fsm
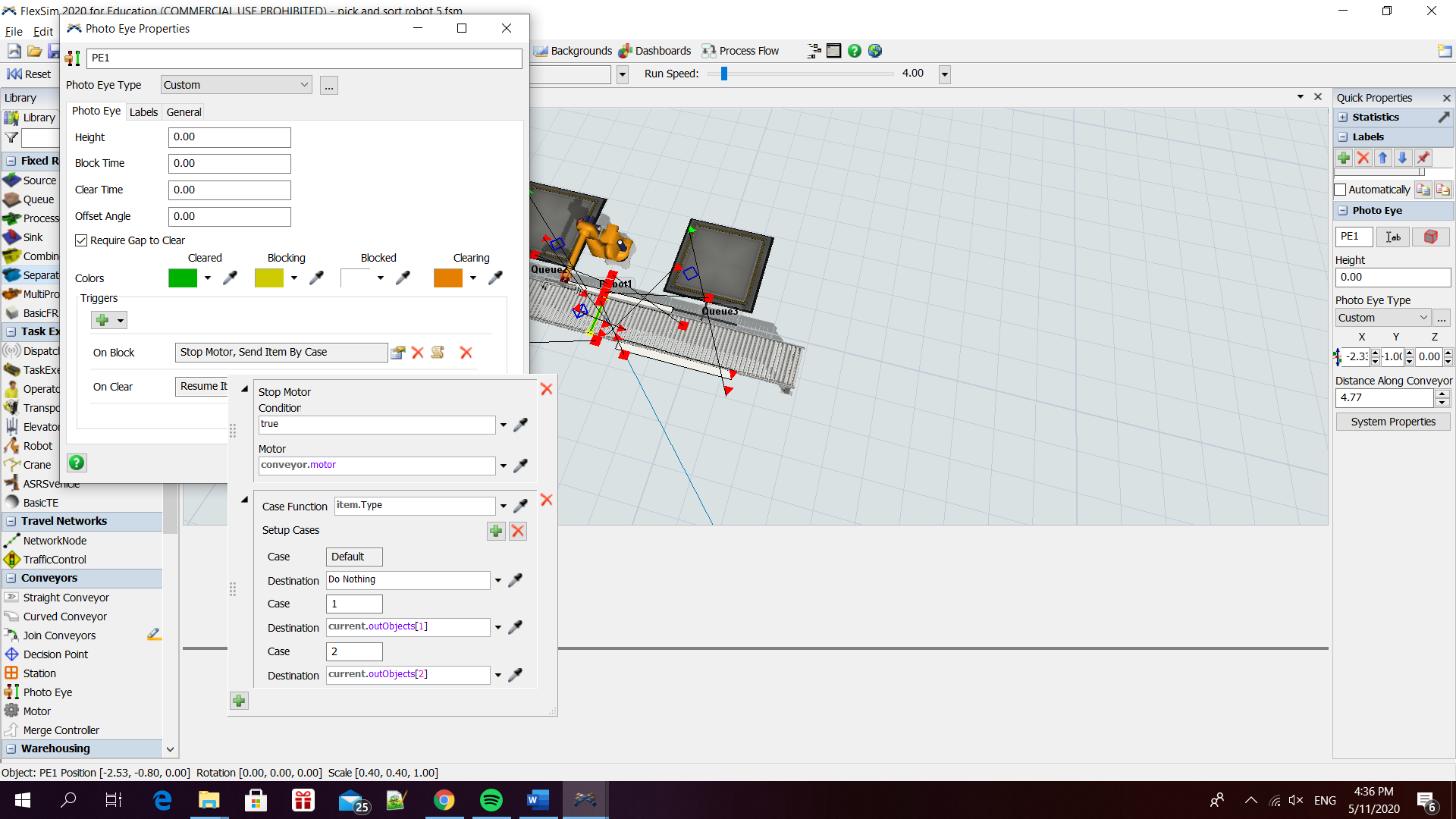
- PE > Trigger on Block or any other: Picklist Template "Send Item By case". Add cases for output connections 1 and 2.
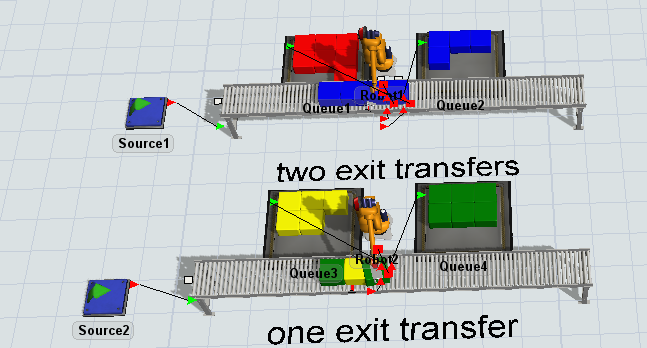
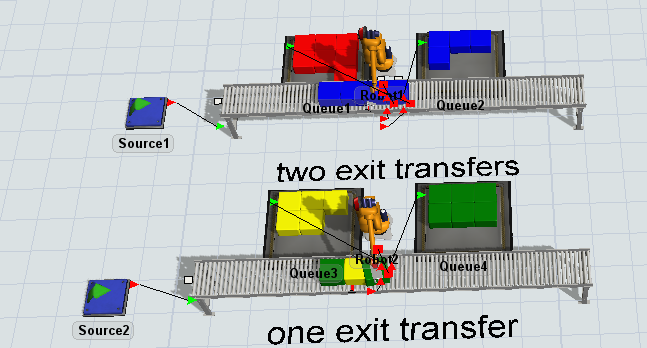
- Create another Exit Transfer to the other Queue
- Connect the Photo Eye with the new Exit Transfer by an Object Connect (A). It is another output port.
- Set Parameters of this Exit Transfer accordingly to the first, like Use Transport and set a center port connection to the robot, too.
A personal hint for Robot properties: Use Simple Motion Method before you are going to adjust the path points on your own.
Hi good evening thanks for replying Jorg, I have done the first step (Assuming I'm right) where I added cases for output connections 1 & 2 Upon being covered as I required them to simulate the environment where the sensors picked up an incoming object and send out an output to the motor to stop the conveyor belt and then using a transponder to sort the coloured object out. Do I delete the decision Points etc? Also after being able to create another Exit transfer, do I still have to connect the photo eye to my original (First) Exit transfer by Object Connect (A)? My model attached is as shown below and it seems kind of stucked right now.pick and sort robot 5.fsm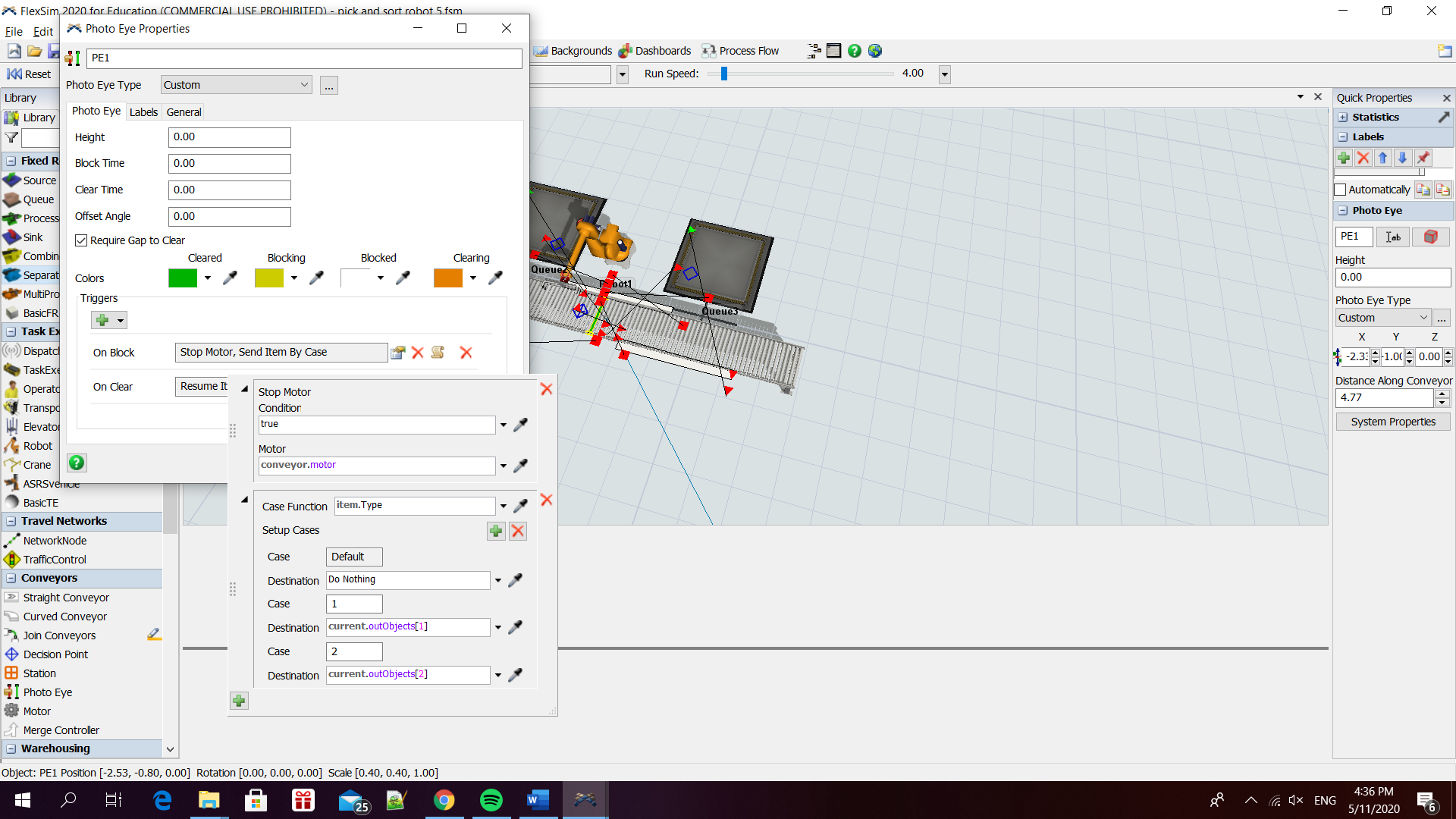
{kind=link}
you can send item in PE to two exit transfers. Or you send all items to one exit transfers, but then you send them to two queues in the exit transfer.
{kind=link}
Thankyou very much Jorg, I have another issue on hand right now. Sorry for the late reply. I have modified my model right now to simulate a pick and sort situation. However, the actual prototype have a traffic light system that indicates the status of the conveyor belt ( When moving, the traffic light will light up as green, when the convey belt stops, it will light up as red, While transporting/sorting the object, it will indicate as ember color.) May I know is this possible, would it be possible to pick up signal from the photoelectric sensor and shows the status of the traffic light object by automatically changing it's color? If so can you show me how to do it? I have heard of using GUI but I am totally clueless to do so. Thankyou in advance :)
@Malcolm L3, this sounds like a completly new question to me. So please ask this as a new thread, that everone can think about your request. Thanks!
11 People are following this question.