robotic_arm.fsmI want to delete queue 3 and make the robotic arm hang with the box until the forklift comes and then the robotic arm continuously picks up the boxes and fills the forklift until it reaches 4 boxes. Moreover, I want the robotic arm to fill the forklift with 4 boxes before the forklift leaves. So the first box would be immediately loaded. The other boxes make the forklift wait until it is finished.
robotic arm waiting for the forklift
FlexSim 21.2.3
Hi @Osama A6, was Jeanette F's answer helpful? If so, please click the "Accept" button at the bottom of their answer. Or if you still have questions, add a comment and we'll continue the conversation.
If we haven't heard back from you within 3 business days we'll auto-accept an answer, but you can always unaccept and comment back to reopen your question.
Hello @Osama A6
The best way to accomplish this is to use Process Flow.
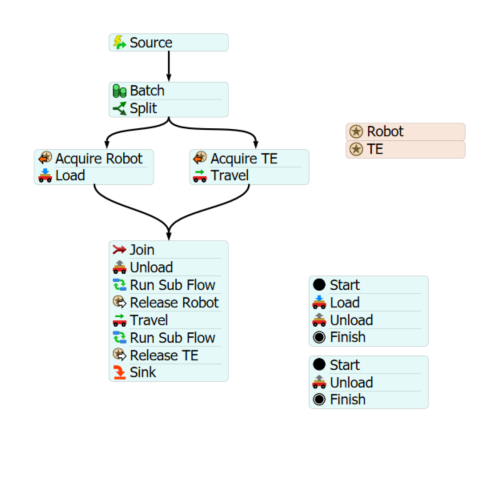
Please reference the model for how each activity is configured to accomplish this.
Thank you so much for your answer, but I'm looking for a robotic arm that keeps grasping the boxes, even if there is no forklift. We have two movements. If there is no forklift the robotic is will hang the box (only one) in the air until one forklift comes. If there are forklifts, the robotic arm will continue collecting boxes directly to the forklift bed or fork.
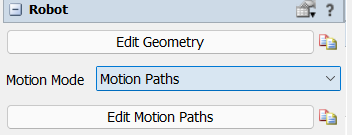
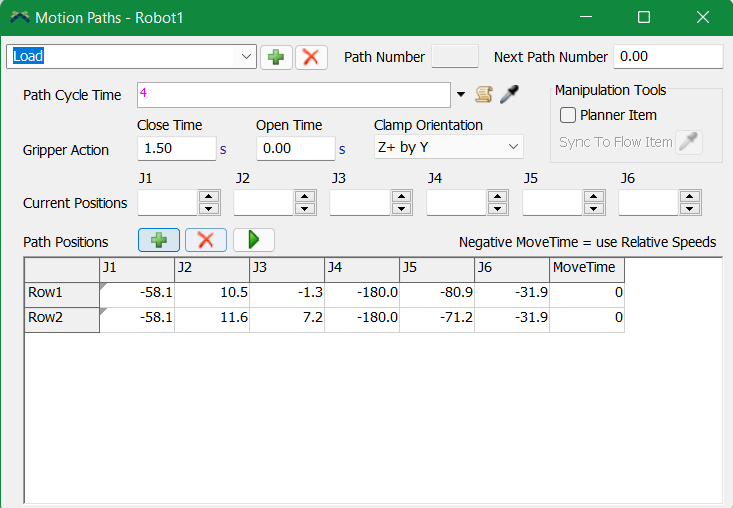
Hello @Osama A6, The model does have the robot retrieve a box even if the task executer is not available yet. You can alter the animation of the robot by selecting the robot and then in its properties under the robot tab change the motion mode to motion paths. Then selest edit motion paths.
8 People are following this question.