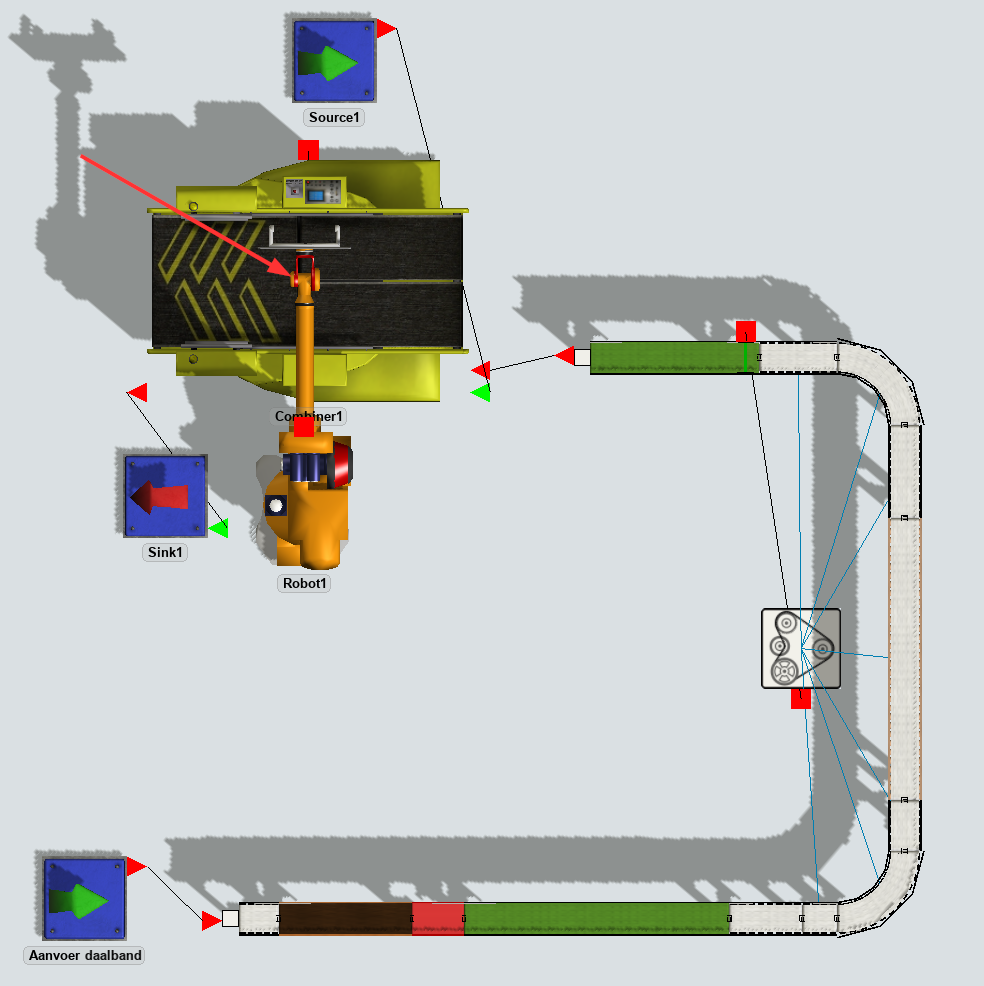
Hello, I'm trying to simulate my robot in conjunction with the feeding conveyors. I'm having issues with the start-up of the simulation because the robot is in the wrong position when it gets the first flow item and causes a delay in the process.
Is it possible to set up the robot already in the picking position when the first flow items arrive?
thanks in advance! simulation robot.fsm