We have been doing some tests on the new AGV functions and we have some questions on how some things work. First of all the new features look really useful and work pretty nice!!
We are trying to customize the rotation of the AGV at the transfers. This seems to be almost working already, but maybe you could explain the steps a bit more. We are for example not sure what all parameters mean. Our code now looks like this: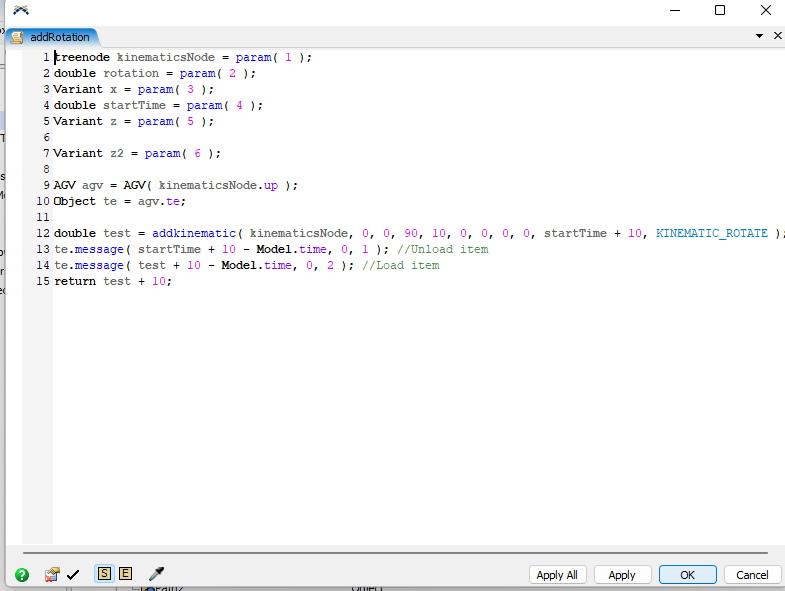
We want the AGV to wait 10 seconds before the rotation starts. When the rotation is finished the AGV again needs to wait 10 seconds before it continues to travel. After these wait times the AGV either needs to unload or load the items. We have now done this by sending a delayed message. Is this how you intended this feature to be used, or are we maybe missing some steps?
We are for example not sure if we have the information to know if the AGV should rotate +90 degrees or -90 degrees. Is there information available in this code to know this? Can the settings from the AGV network be used? Or should we decide that our self in this code?
Thank you for some extra explanation about this code.
Patrick