Hi, I am using Advanced AGV PF.
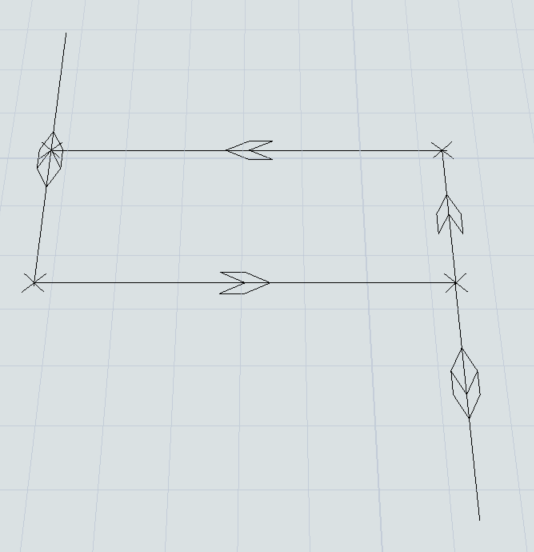
Due to layout limit, the AGV paths are designed as shown. And it probably will have deadlock when there are 3 AGVs.
AGV is required to transport item from Queue A to Queue IN. Then, from Queue OUT to Queue E.
To solve the deadlock, I have an idea that create a list named "NextPoints" in AGVNetwork and hope to direct the AGVs to the NextPoints when there is deadlock. Is it possible to make changes in the Advanced AGV PF or I will need to create another Object Process Flow?
My idea: Wait for event (AGV On Collision) > Pull From List (NextPoints List) > Travel (Travel to the nearest NextPoints)
Any help and suggestions will be much appreciated!