In my previous post, there are all unidirectional paths.
To cope with bidirectional paths, I add a process flow "Path planning" and new control points connection, named "Alternative".
I want to check the AGV "travelPath" when it receive a task, if there are paths that coincide with other AGVs, then redirect the AGV to an alternative route by searching the current cp's Alternative, if there is no available path, delay. This method is reference to this post.
Due to my immature coding skills, there is some exception, any advice would be much appreciated!
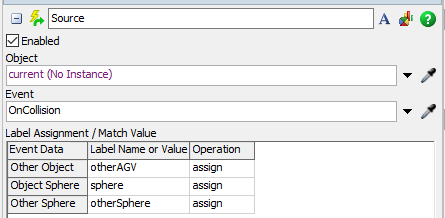
Besides, how should I define the value of otherAGV in <Assign Labels> activity?