Hello,
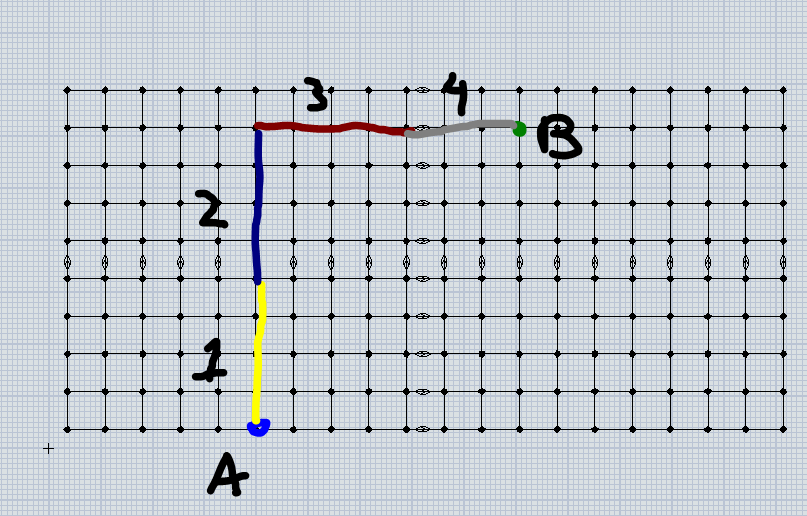
Is there a way to alter the AGV navigator in a way that each path has a "max segment length"? In other words, I want to give my AGV a target destination that it should go to, but I want to stop the AGV every X number of grid nodes. This is so the AGV can perform a "check" every once in a while to make sure everything is okay.
Is this doable?
Thanks.