Hi,
In the attached example model the AGV gets a travel task to the third control point in the picture, with a path offset of -0.5. This means that the AGV stops at the position from picture 2: 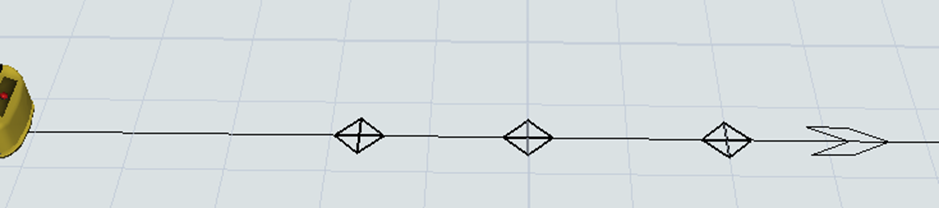
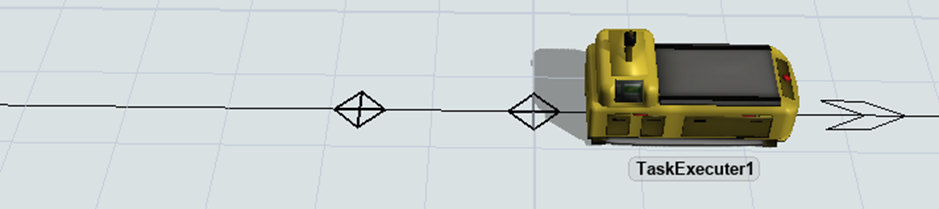
We would expect that the pre arrival fires for the first two control points, but it only fires for the first control point. It looks like the pre arrival does not fire when using path offset for both control points where the AGV stops between. Is this how the pre arrival event works when using path offset? Or how do these two work together?
Thanks,
Patrick