When I connect a Processor to an AGV network and use the Advanced AGV process flow, the process flow doesn't register when an item is loaded from a Processor onto an AGV.
Thus the AGV belives it needs to unload something and will never park.
When I connect a Processor to an AGV network and use the Advanced AGV process flow, the process flow doesn't register when an item is loaded from a Processor onto an AGV.
Thus the AGV belives it needs to unload something and will never park.
If you remove the process flow and add a fresh Advanced template it works, so did something get edited?
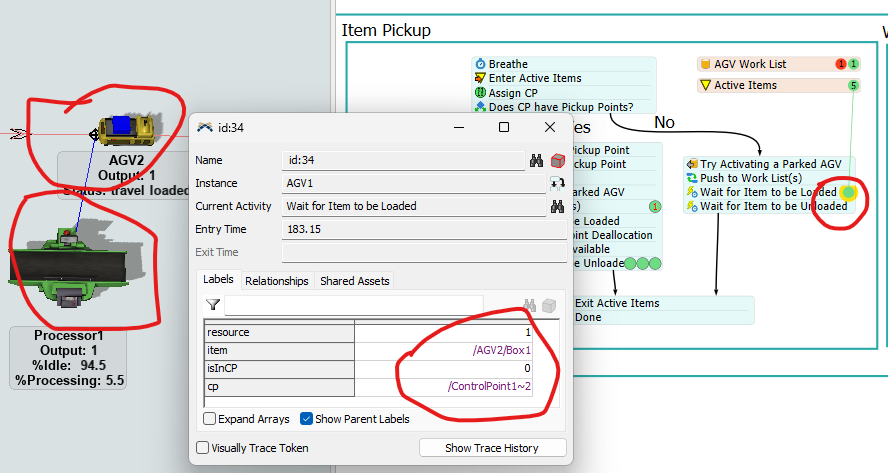
The AGV is to stop at the processor, unload its item, wait for processing and wait for loading the item back on the AGV (actually the unload and load are not needed). Thus I added a wait for processing in the unloading process flow.
The problem appears to be that when the processor pushes the travel task (item) to the list "AGVWork", the AGV doesn't find it - as it is supposed to - checking for items to load at its current location.
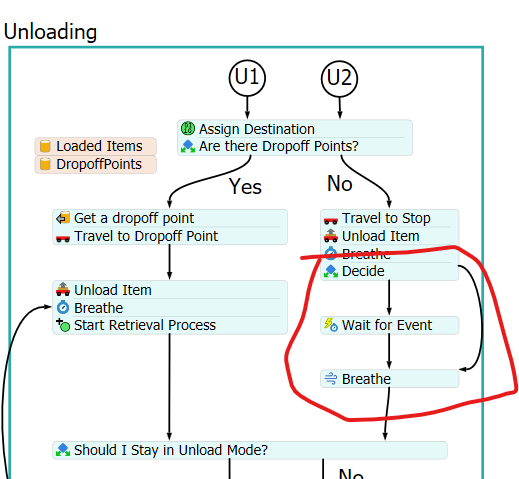
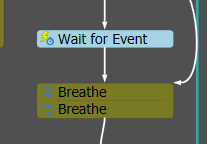
If you add a second breathe activity after your extra wait activity (for process finish) it will work. The issue is that the (item pickup) token waiting for the item entering an object (expected to be the AGV) isn't entering the wait until after it has been loaded, so then fires when the item is unloaded (to a fixed resource).
17 People are following this question.
FlexSim can help you understand and improve any system or process. Transform your existing data into accurate predictions.
FlexSim is a fully 3D simulation software environment. FlexSim can be used to simulate any process in any industry.
FlexSim®, FlexSim Healthcare™, Problem Solved.®, the FlexSim logo, the FlexSim X-mark, and the FlexSim Healthcare logo with stylized Caduceus mark are trademarks of FlexSim Software Products, Inc. All rights reserved.