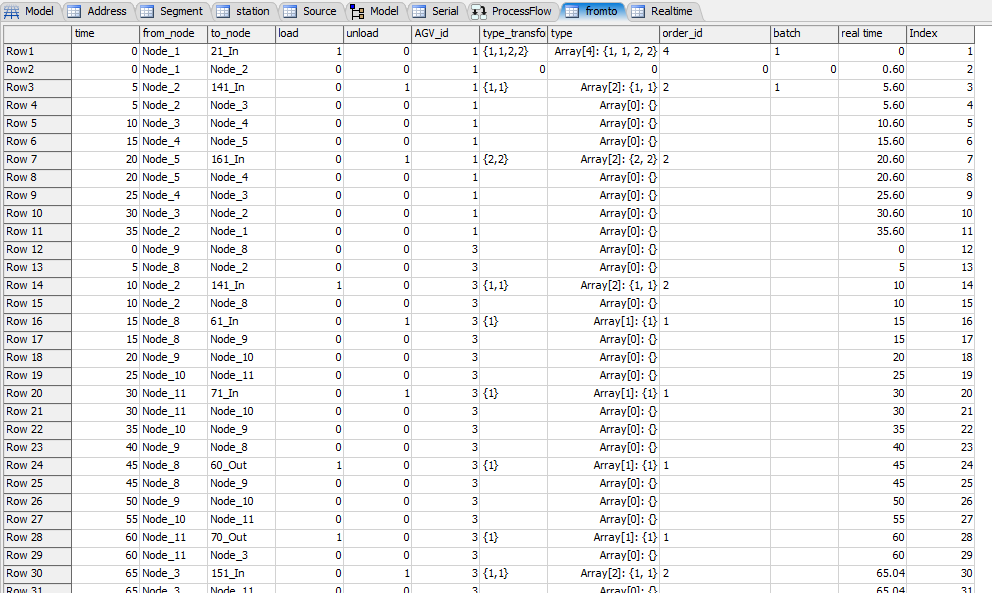
I created a from-to table and hope that AGVs can load and unload objects at specific times according to the from-to table.
For example, I hope that at the 0th second, the AGV can run from Node_1 to Node_2, and at the 5th second, perform the unload action on Node_2.
The current model seems to be running smoothly.
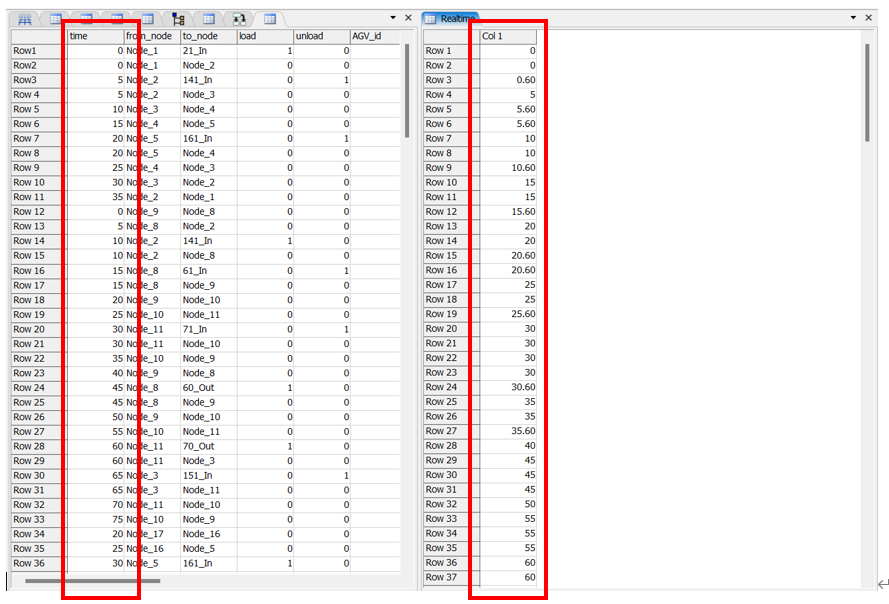
However, when I recorded the real time when the AGV arrived at a specific point, I found that it was different from what I expected.
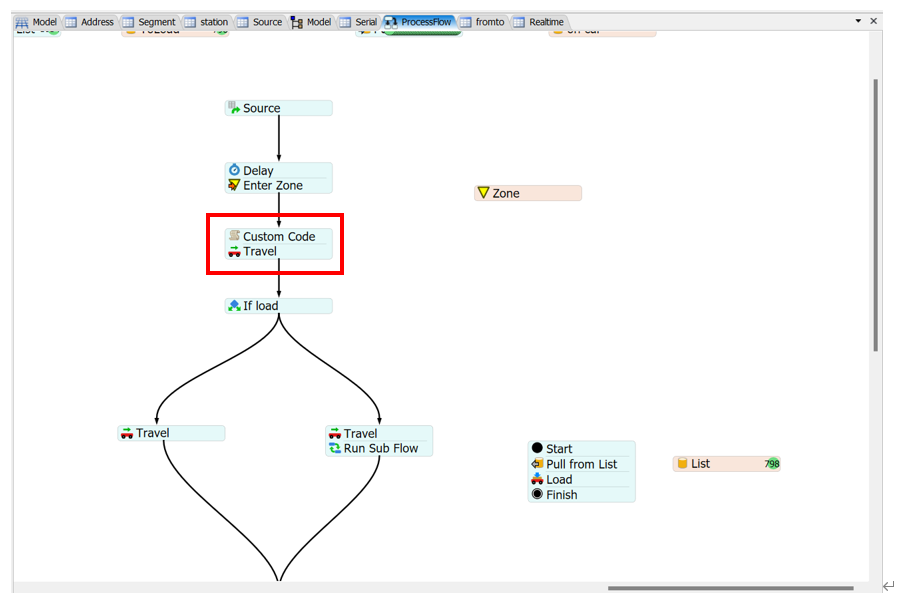
( I wrote a custom code to record the model time before the AGV travel.)
I want to know if I am using the wrong method?And how to solve this time problem?
I attached file here.
Thanks in advanced.