new-bod-most-updated-version-autosave.fsm
In the attached model, I would like to know how to set up the process flow so that the Carton (3d Box) is created only after the robot touches the flow item (door)?
Thank you.
new-bod-most-updated-version-autosave.fsm
In the attached model, I would like to know how to set up the process flow so that the Carton (3d Box) is created only after the robot touches the flow item (door)?
Thank you.
In order to work around the combiner's default logic of requiring a container item to enter the combiner through port 1 before accepting any additional items, we need to manually tell the robot to pick up the door and move it into the combiner.
In the attached model I have created a Move Door process flow that manually loads and unloads the door using the robot.
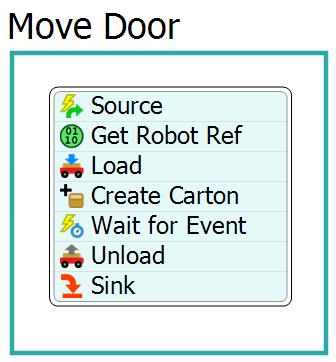
The Source is listening to the Send To Port on Conveyor 3's exit transfer (the transport dispatch field will never be called as the conveyor has no where to send the door). We then use a Load activity to tell the robot to load the door, create the carton and wait for it to enter the combiner. We can then unload the door into the combiner. If you wanted to have the robot move the door to a set position before unloading, you could accomplish this by adding a Travel to Loc task after creating the carton.
I did also uncheck the Use Transport box from Conveyor 3's exit transfer as we're performing our own logic there.new-bod-most-updated-version-working.fsm
I modified the model that @Sam Stubbs sent you. Maybe something like this would work better for you?
Model: new-bod-most-updated-version-3.fsm
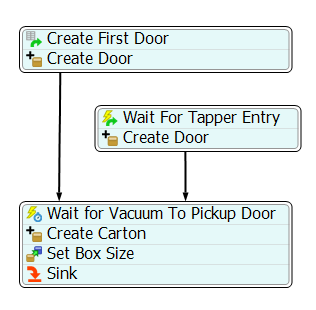
What I basically did was to use the Robot to move the door from the queue to the conveyor. That way it "touches" the door (kicking off the creation of the box) before it tries to pickup the door to move it to the combiner.
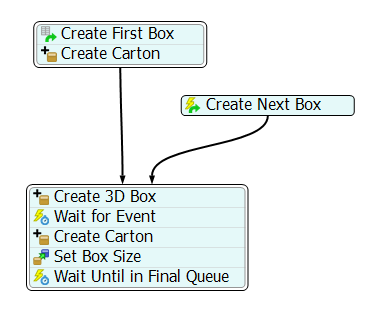
I think I was able to fix what you needed. I added a "Wait For Event" activity listening for the Robot's "OnLoad" event to trigger, and placed it between the "Create a 3D Box" and "Create Carton" activities. Then added a "Create Carton" onto the "Create First Box" to get the logic to flow for the first one.
 I've reattached your model.
I've reattached your model.
11 People are following this question.
FlexSim can help you understand and improve any system or process. Transform your existing data into accurate predictions.
FlexSim is a fully 3D simulation software environment. FlexSim can be used to simulate any process in any industry.
FlexSim®, FlexSim Healthcare™, Problem Solved.®, the FlexSim logo, the FlexSim X-mark, and the FlexSim Healthcare logo with stylized Caduceus mark are trademarks of FlexSim Software Products, Inc. All rights reserved.
May we collect and use your data?
Learn more about the Third Party Services we use and our Privacy Statement.May we collect and use your data to tailor your experience?
Explore the benefits of a customized experience by managing your privacy settings for this site or visit our Privacy Statement to learn more about your options.