I am working on a warehouse network where the AGVs when moving on a path accelerate at one value (say A) for a certain distance, then the acceleration changes to a different value (say B) until it reaches a certain velocity (say V) and then accelerates with a different value (say C) till it reaches the max velocity (say Vmax), then it continues with the same velocity (Vmax), and then decelerates at a constant rate (say D) till it stops. Is it possible to simulate this using the AGV module?
You could probably model this situation in various ways. Here are a few ways that I think might work:
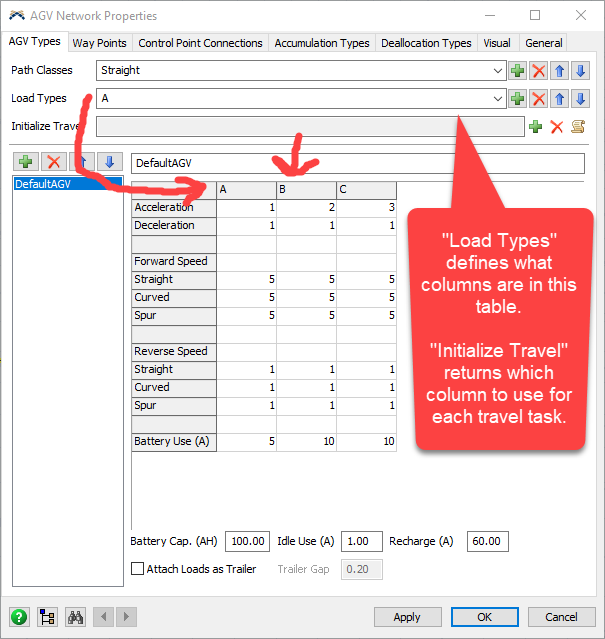
1. On the AGV Network Properties window, you can specify different accelerations and speeds based on a value set when an AGV begins a travel task:
After configuring this table, you could write your logic as below in order to model your described situation:
- Set a label on the AGV for its load type ("say A")
- In Initialize Travel, return the column number based on the AGV's label
- Give the AGV a travel task to go "a certain distance" (you could use a control point and travel to it)
- Set a label on the AGV for its load type ("say B")
- Determine the point at which you would reach velocity ("say V") and give the AGV a travel task to go to the point it would reach at its given acceleration and velocity.
- Set a label on the AGV for its load type ("say C")
- Give the AGV a travel task to go to its final point using the acceleration ("say C"), velocity ("Vmax"), and deceleration ("say D").
2. You could follow Anthony's post Customizing AGV Speed with Jerk to customize the AGV's kinematics however you want.
3. Since the situation you described will take a precise amount of time to get from the beginning to the end of that whole task, just calculate what that time should be and specify speeds/accelerations such that the AGVs take that amount of time to travel the required distance. Make simplifying assumptions so that you can get the correct results without all the difficulty, even if the visuals are not entirely perfect.
16 People are following this question.
