I'm having problem with AGV rotation, previous I use joint path with very small angle to connect 2 paths, but I have difficulty connection these paths, the connections don't always have a "cross" sign whenever I connect 2 paths or I use joint to connect paths. I don't know what this time I really spend many times build the networks and putting on CP, but the connections got messed up very easily. This would cause unable to control AGV traveling in process flow.
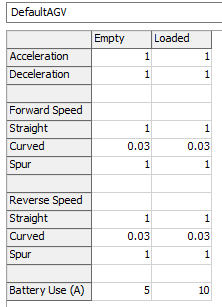
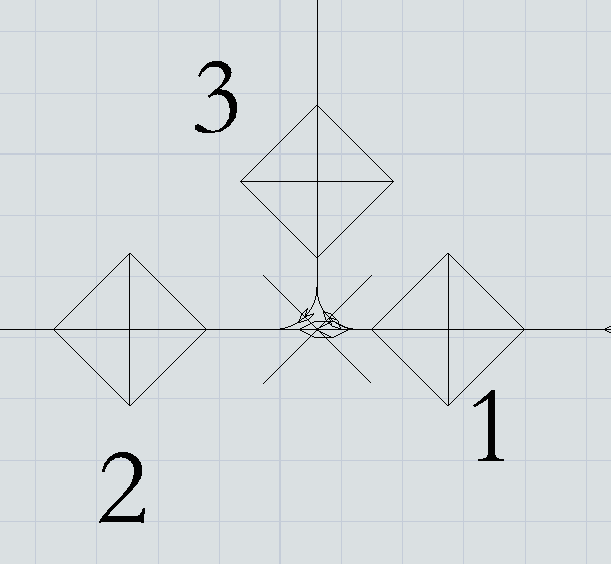
In the attached model, I need to add controlpoints on the junction between every paths, I want the turning could look like AGV stops at one point and then do 90 degree rotation. The way to make it look like 90 degree rotation is let the "curve path" has significantly slower speed, and I set this in AGV network panel, but AGV seems like traveling without slow down. I would like to know why the setting is not working as I expect.