Hi. I have tried to build a kinematic device that has three joints: x, y and z. I can't find out, how can I move one joint at the time from ProcessFlow (or any other way)? I want to keep the kinematic "chain": if x moves, y and z follow. If y moves, only z follow. Pls find example attached. portal1_1.fsm
In this case I would use the "old fashioned" triggers on the task executer. I.e. "On Begin Offset", "On-Update Offset" and "On Finish Offset". This will also automatically give you the offset from the TE to item which is to be moved. In addition you can fine tune the exact location using Pick Offset and Place Offset on the objects containing the items you want to move.
https://docs.flexsim.com/en/22.1/Reference/3DObjects/TaskExecuters/BasicTE/BasicTE.html
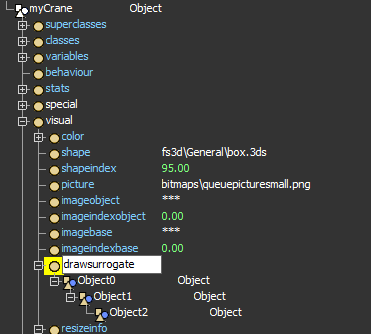
Try adding three kinematics - one for each of the Objects you added in the animaiton editor and are found in the drawsurrogate tree:
What is wrong with my initkinematics? It does nothing.
Object myLift = model.find("myCrane"); // Base object
treenode x_axis = myLift.find(">visual/drawsurrogate/Object0"); // Object to execute the kinematics
myLift.labels.assert("kinematics_x"); // Create label for empty datanode
initkinematics(myLift.kinematics_x, x_axis , 0, 0);
updatekinematics(myLift.kinematics_x, x_axis );
15 People are following this question.