Hello, I would like to solve AGV traffic control problem for bidirectional problem. For simple model, I have only AGV object flow in model, traffic problem could be solved using control Area in flexsim. For more complicated models, our country distributor suggests to use another object flow(the instance object is a cp, it's function is like a central controlling brain of the intersection or place that need to be controlled.)
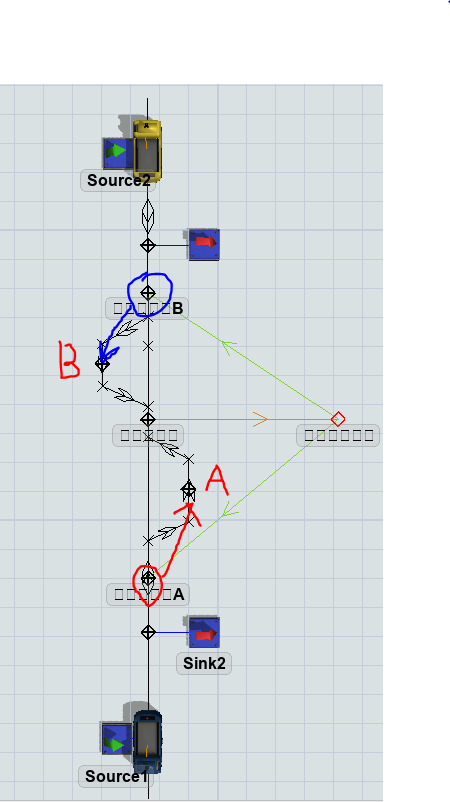
Now my problem is how to synchronize two objects flows? When there are more than 1 agv travel face to face on the same path, I need traffic object process flow instance send message to AGV object process flow to ask agv to travel to a parking point nearby(like A, B in the picture), waiting there temporarily until control area empty.
If first problem could be solved, then there would be 2 process flows control AGV. Although the traffic object process flow instance is a cp, but in it's subflow it create token that is assigned to AGV in 3D world. So my second problem is that it's hard to control AGV from two process flows. I actually want to build logic from AGV's point of view. I think this would be easy to control and debug.
