My task executers are ending up in collision. How to handle such collision for A star navigator? I have checked enableCollisionAvoidance. Attached models tops at 8:00:20
To have a task executer plot a course around another inactive task executor it has to be added as a dynamic barrier during the path calculation.
@anthony.johnson demonstrated this functionality in his KIVA system example model.
https://answers.flexsim.com/articles/107103/example-kiva-system-model.html
Essentially you react to a task executer triggering the path calculation with an event triggered source and return an array of objects that should act as barriers during the calculation.
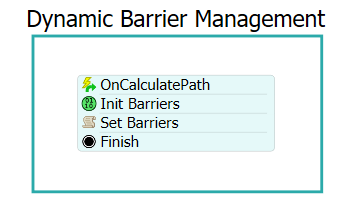
I adjusted your model to return all task executers that are currently in an idle state.
Thanks Felix. A follow up question, do you know where I can understand the sequence of events such as calculate path, navigate path etc ?
18 People are following this question.