我之前有在另一個問題詢問過了,但因為檔案的問題無法解決,目前的問題是我不知道報錯發生的問題是甚麼。
A* custom code problem
FlexSim 20.0.10
Hey @mark zhen, I found one of your problems.
In your AGV Process Flow, the "Custom 1Code" activity tries to call ".first" on a variable that is null.
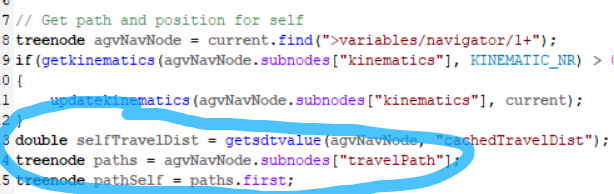
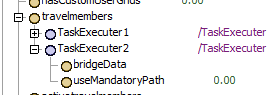
The "paths" variable comes out null, meaning that there is no "travelPath" subnode coming from the agvNavNode variable. When I go to the "agvNavNode" location, this is what I get (it's referencing TaskExecuter2 in the error at 18 seconds).
You'll have to get the paths of the agv another way.
19 People are following this question.
