Dear all,
When multi AGV meet at the intersection, the order which AGV pass the intersection is based on the allocation of control points, which is FIFO. I wonder if I could replace this rule with the AGV which nearer its destination pass first? Below is my idea:
1. Trigger AGV On Load, use cpdistance to calculate its distance between pickup point and drop off point.
2. AGV speed is fixed, then I could calculate the “finish time” needed by using distance data above.
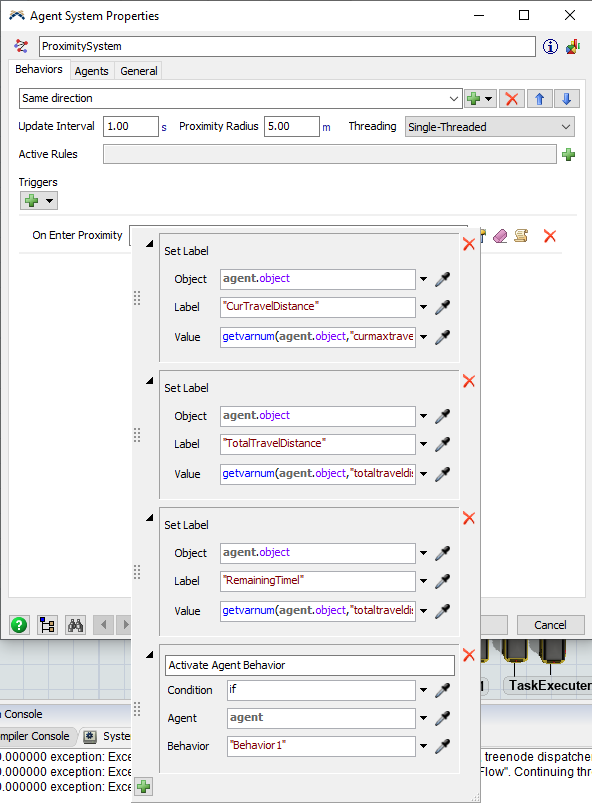
3. I would like to use Agent System to detect the distance between AGVs and use Behaviors>On Enter Proximity> Activate Agent Behavior to replace the allocation of control points. I think I need to assign a label “RemainingTime” (=finish time-current time) to AGVs so that I could compare the value of label in the Activate Agent Behavior’s condition and let the AGV with less value pass first.
I wish to use AGV template in Flexsim, but I have no idea where should I modify to add an “Assign label” activity.. Or maybe I should build my own process flow?
Your suggestion and help is much appreciated :)