Hi,
One of our customers has updated its model from 2022 update 2 to 2023 update 1 and the model is no longer working correctly. We have seen another post that seems to be about the same problem, but we are wondering if there is a different solution possible and what the best modeling ways are for modeling such models.
The post that seems to describe the same problem:
How to control the orientation of an AGV on rails in FlexSim 2023 - FlexSim Community
In the case of our customer there is a layout that more or less looks like this: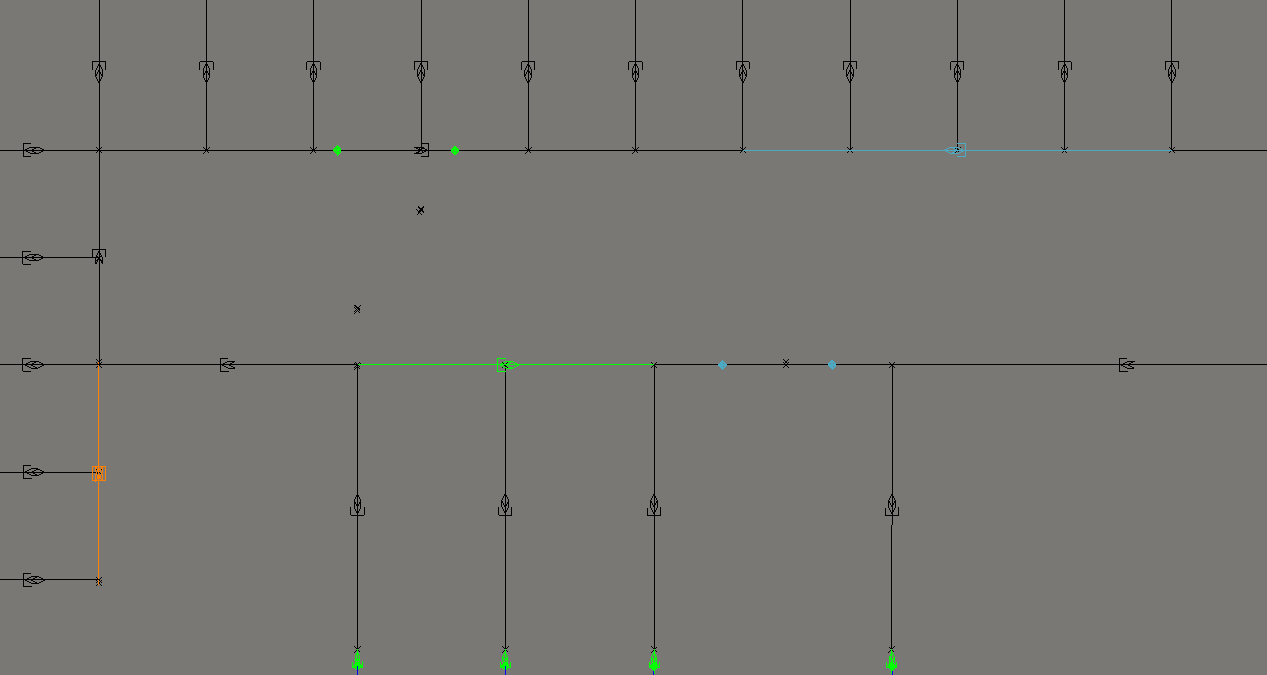
All the path transfers are transfers at path crossings where the AGV needs to stop and rotate 90 degrees. The idea is that an AGV drives forward into a spur path, drop/pick something, drive backward towards the main path and rotate such that it will drive forward again. The customer solved this in FlexSim 2022 Update 2 by adding AGV orientation constraints on the paths. That all worked correctly. However in FlexSim 2023 Update 1 this no longer seems to be an option. The solution given in the linked post mentions adding curves, but if you have a lot of paths, like shown above you don’t really want to do this. Next to the extra work this also changes the outcomes of the model. For the 90 degrees rotation time of the AGV we can define the rotation speed and the time it takes to make this curve.
Ideally we would like something of an option that lets the AGV drive forward after each 90 degrees curve, but not rotate 190 degrees on the spot. I know that Anthony already mentioned a possible option for this but I don’t know if this is something that is on the list to add to the AGV module or that there are other solutions for this. What Anthony mentioned:
“However, in hearing your description about why you need to use orientation constraints, I'm wondering if you really need that feature right now. Instead of a routing-based feature, we could just split the 'turnaround threshold' into two different values. From your description my impression was that generally the AMRs want to travel forward, but they can travel backward in some cases. If we split the turnaround threshold into a 'turn-to-backward' threshold and a 'turn-to-forward' threshold, then you can make the 'turn-to-forward' threshold smaller, say 89 degrees, and the 'turn-to-backward' threshold its normal 91 degrees. Here the AGV would prefer to travel forward, so if it hits a right-angle and it is traveling backward, since the right angle is more than 89 degrees, it will turn around and travel forward from that point. Using this feature, you wouldn't need to use orientation constraints at all.”
To explain the behavior that the customer is looking for in a small example:
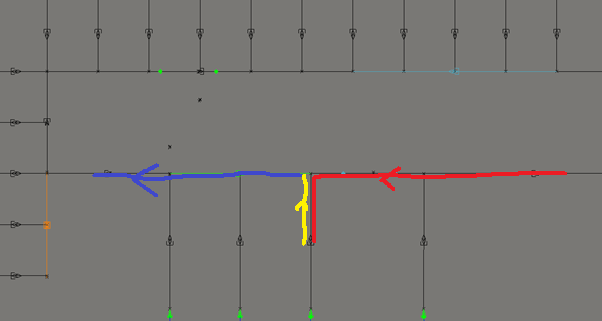
The AGV drives forward over the red path onto the spur. Loads something, and drives backward over the yellow path. It then stops and rotates 90 such that it can drive forward again over the blue path. What would be the best options to model this?
Thanks,
Patrick
