I basically wanted to mimic a universal robot. I am getting the real time joint angle values of the robot into Flexsim via an emulator MODBUS connection. The values are stored in Global table. Those values are updating every 1 second through a model logic. You can see from the image
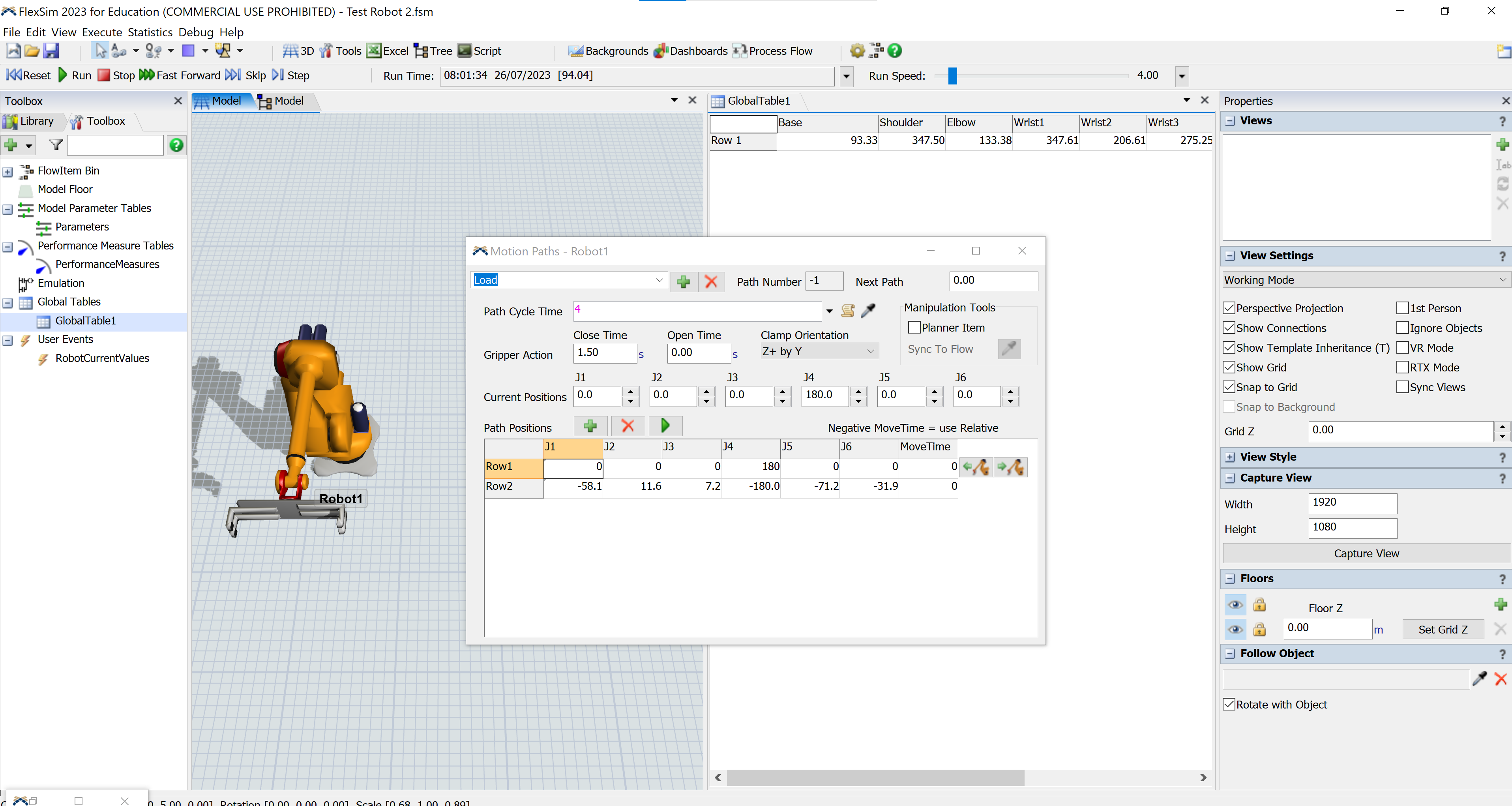
I basically want the Flexsim robot to simulate the Universal robot movements real time by getting the joints angle values from the global table.
Can someone help me how to mimic the robot