How to arrest my animation settings to stay the same even after clicking reset.
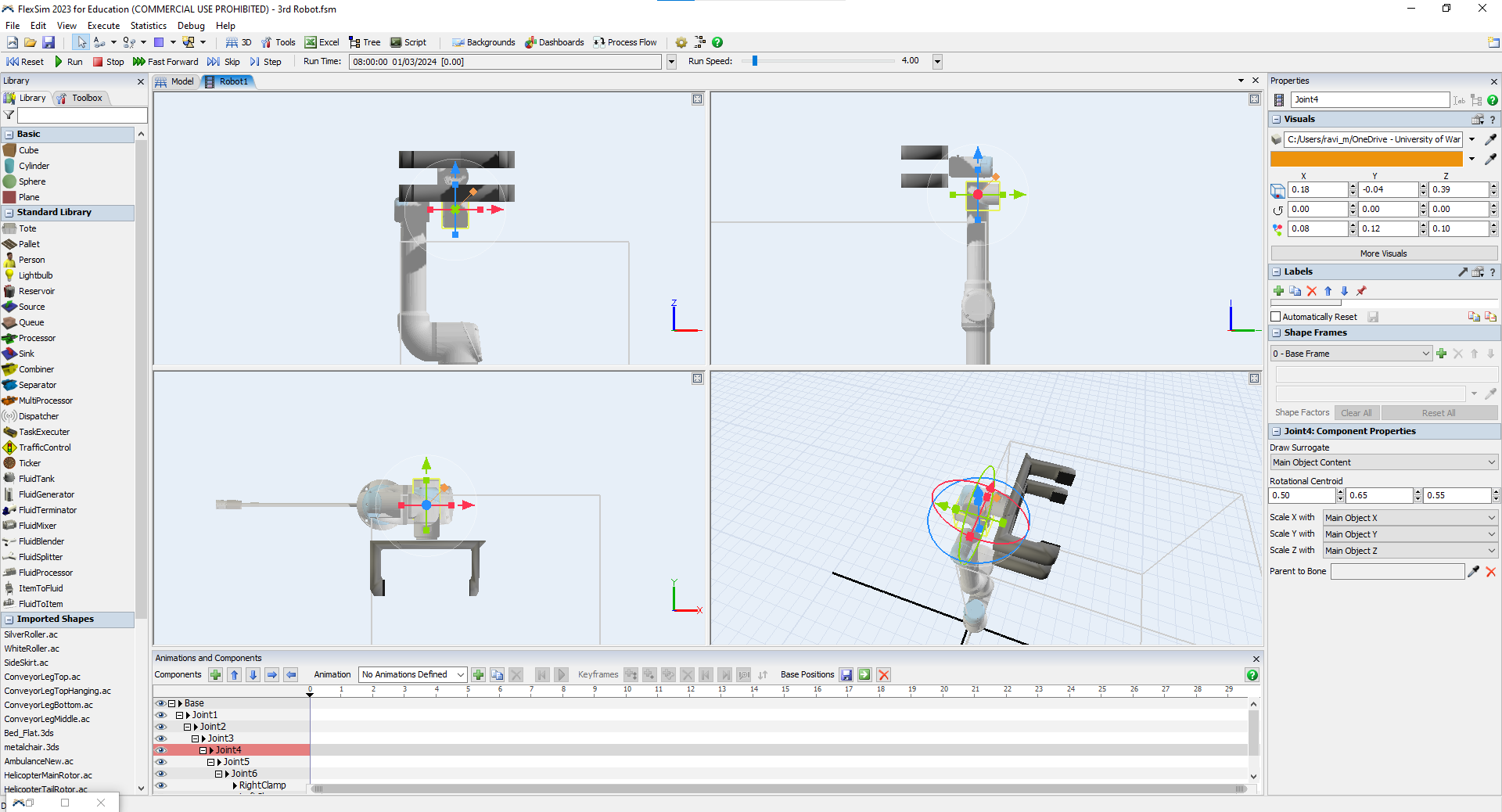
I have animated a UR5E robot on the flexsim robot, you can see on the image
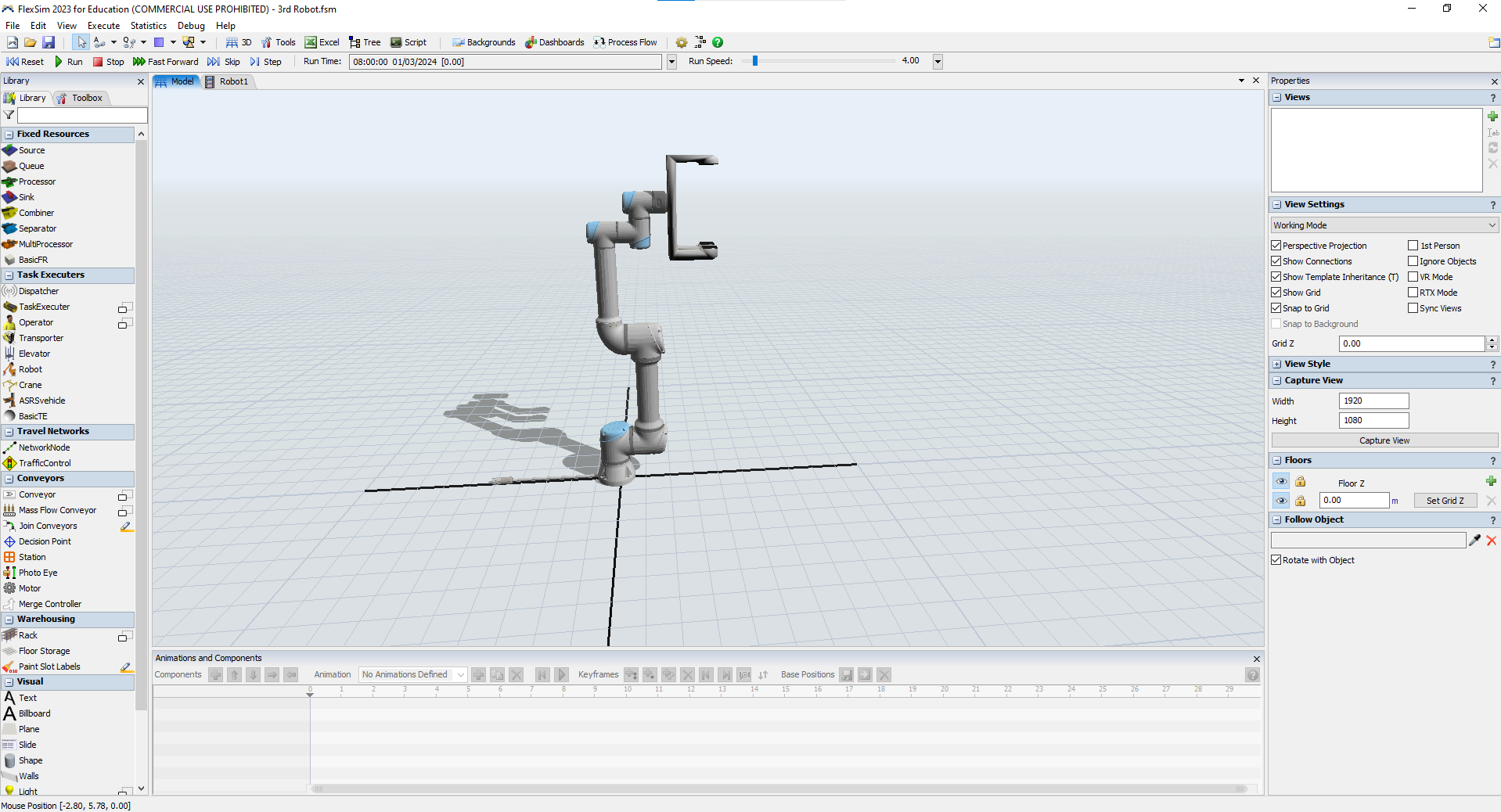
In the animation, I have even saved the base positions 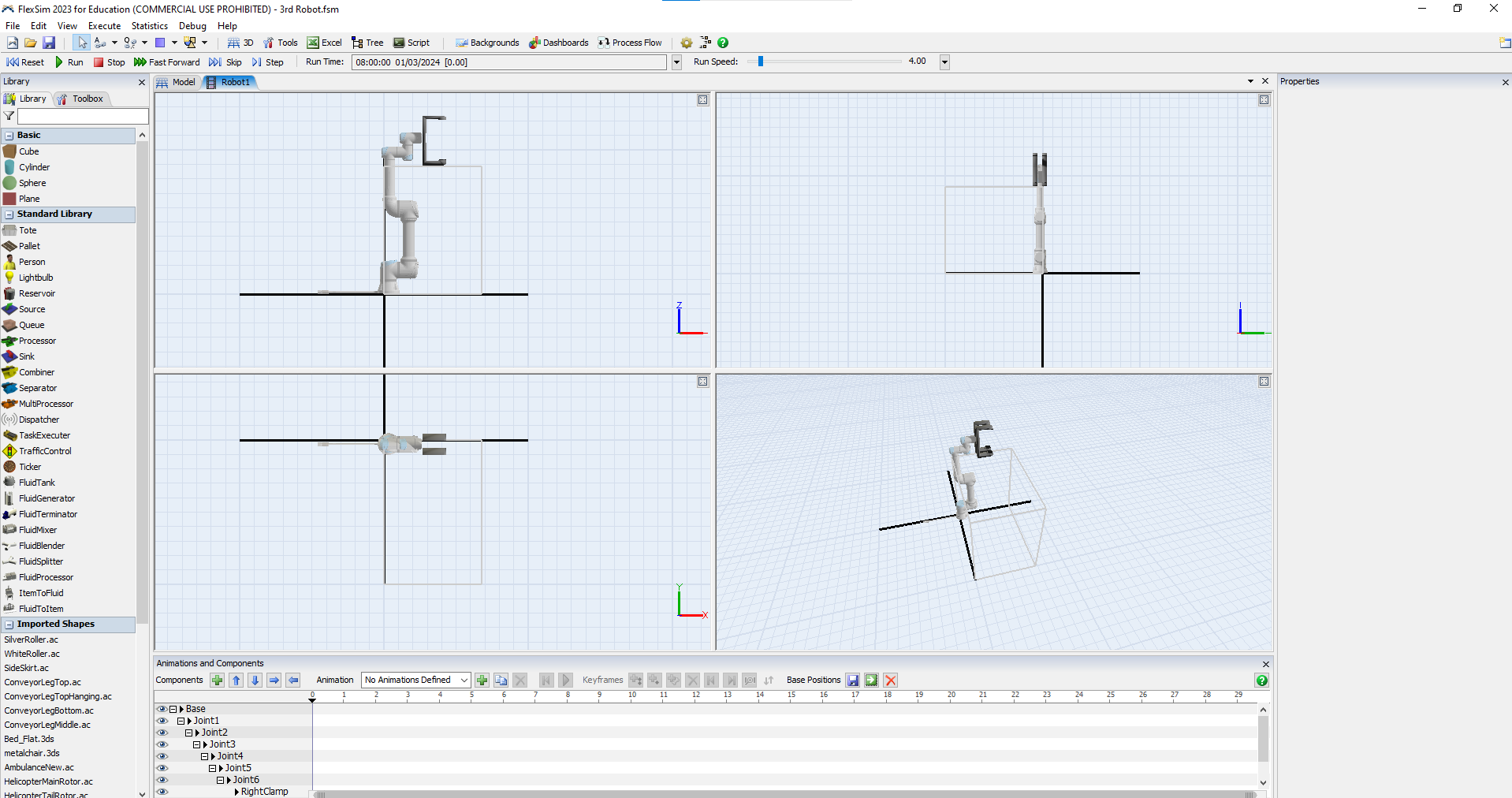
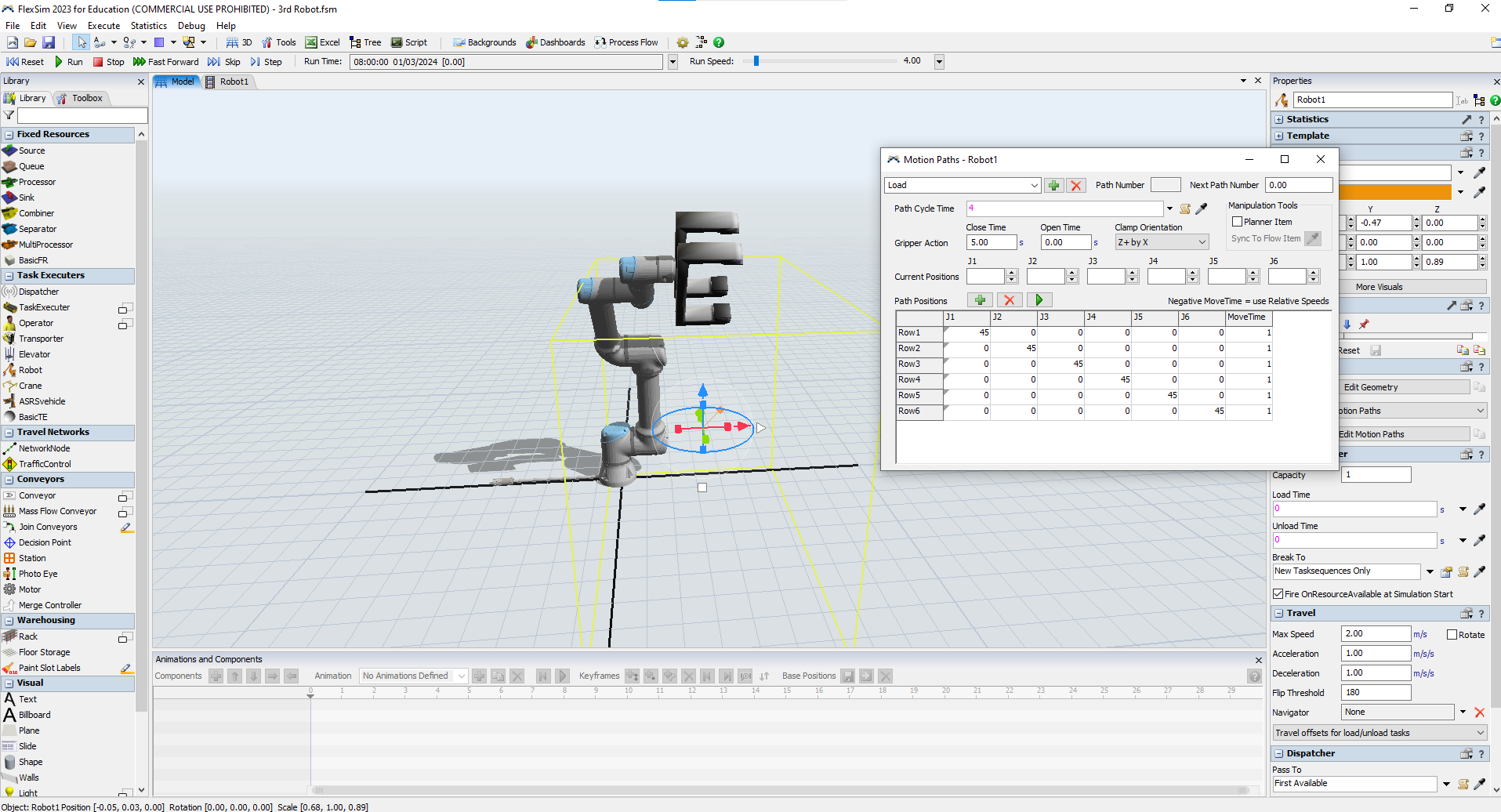
It also works with the motion path i have mentioned and joint configurations align with actual UR5E robot
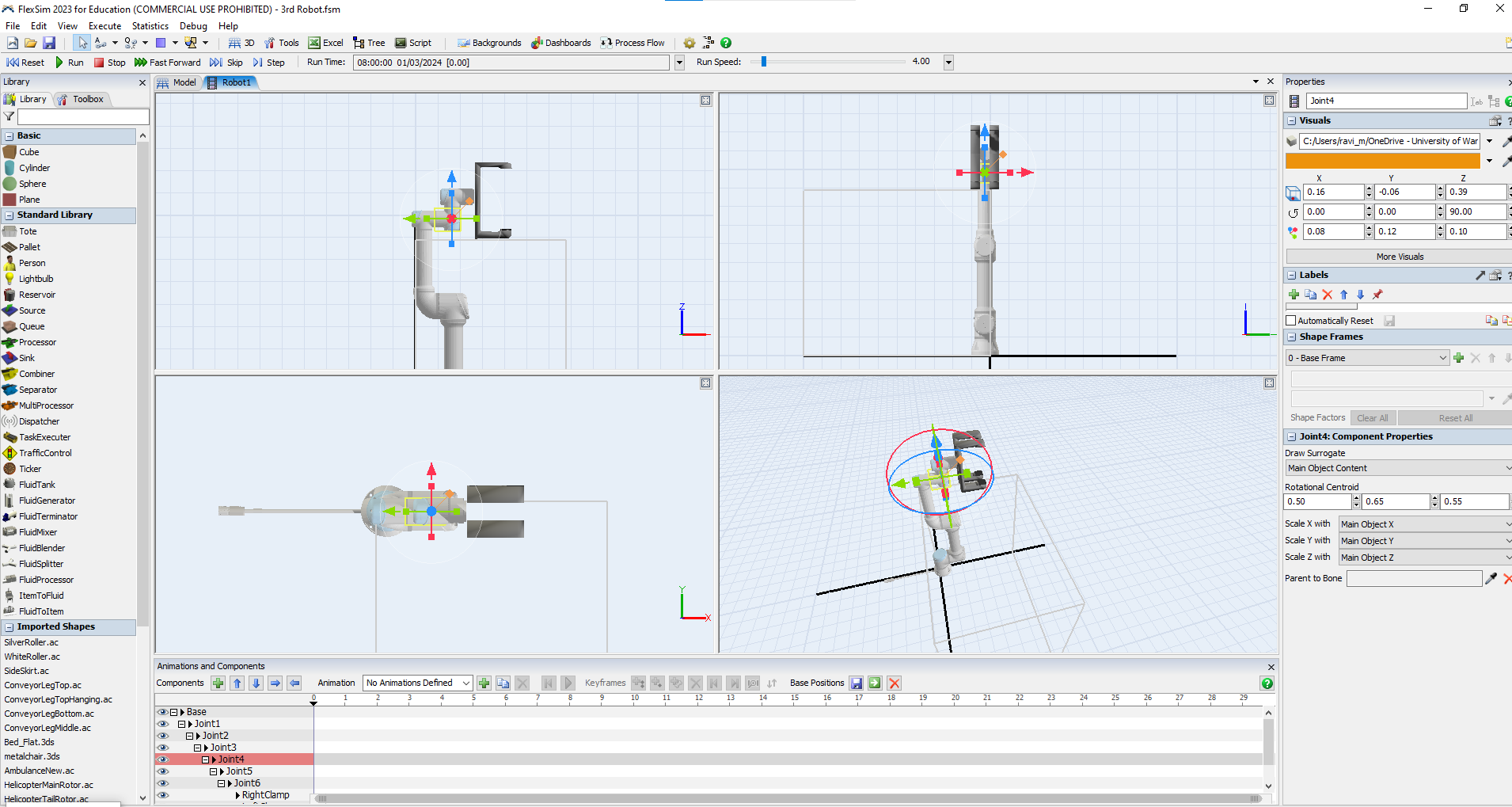
 I have made some rotations for joint 4 & 5 in animation, so that the rotation exists in the flexsim robot axis, eg those are default rotate in y and x axis of the flexsim.
I have made some rotations for joint 4 & 5 in animation, so that the rotation exists in the flexsim robot axis, eg those are default rotate in y and x axis of the flexsim.
Problem is though I saved the based positions and run, it mimics the action of robot, but once i reset the model, the rotations i made in the animations for the joint becomes zero.
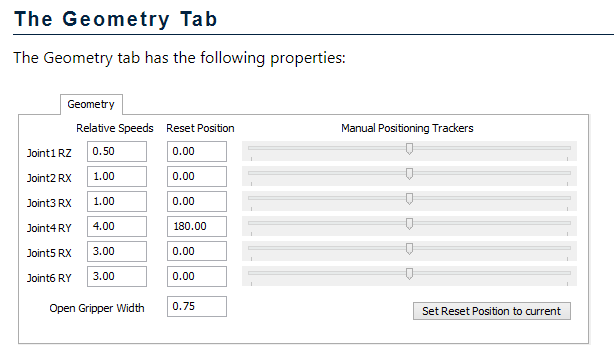
I even tried the robot set the current as reset position.
Is there a way to keep the rotations in animations, while i reset the model??
At present, I am reseting it and going to animation of the robot and clicking "Go to saved component base position to run the model" but if many similar robot s invoved it will be a problem. is there a solution to it.
I am attaching my model.3rd Robot.fsm
