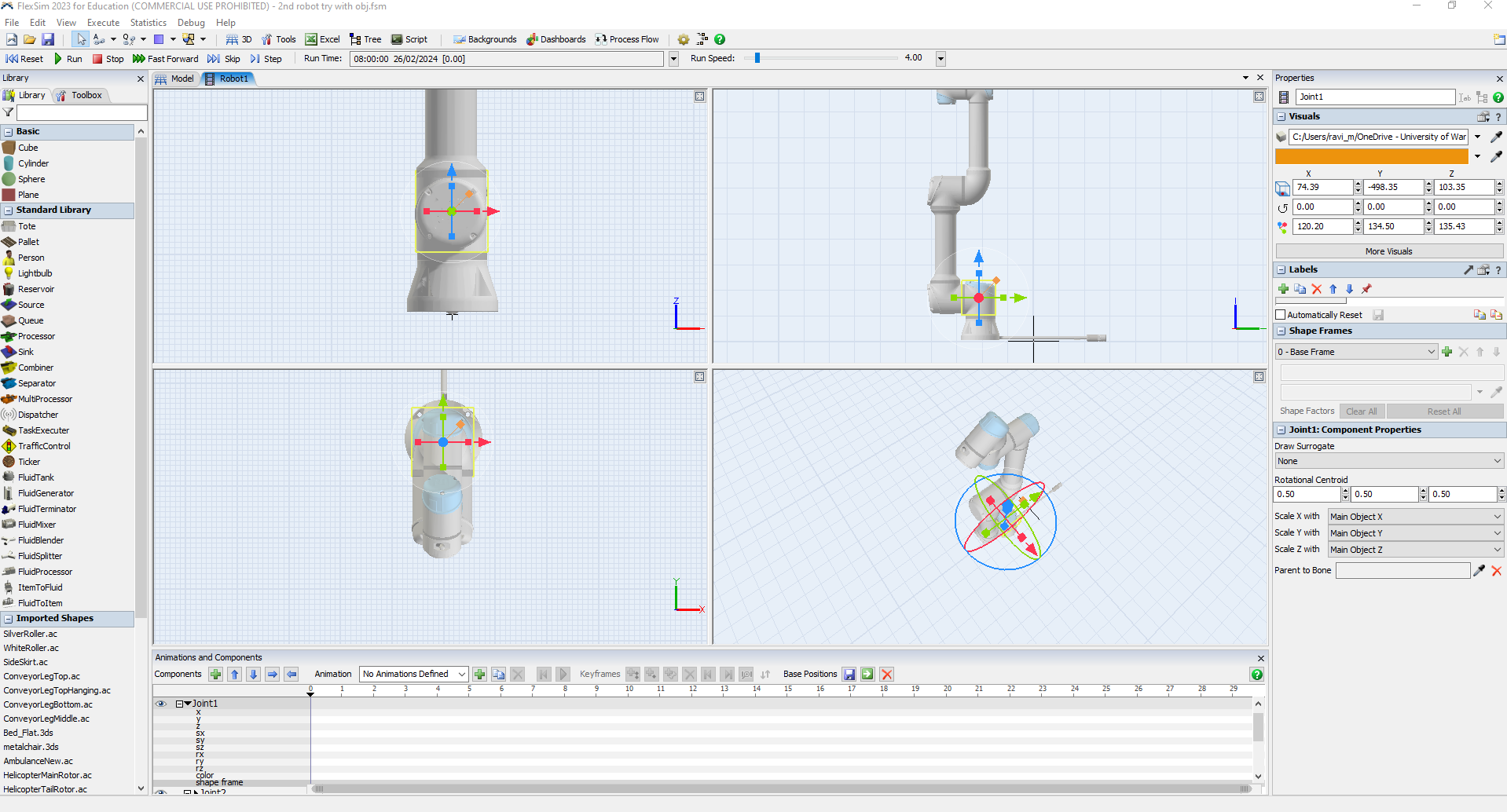
Hi I am trying to simulate UR5e robot in flexsim by using animation editor, I replaced the joints of original flexsim robot model to UR5e one as you can see in the picture.
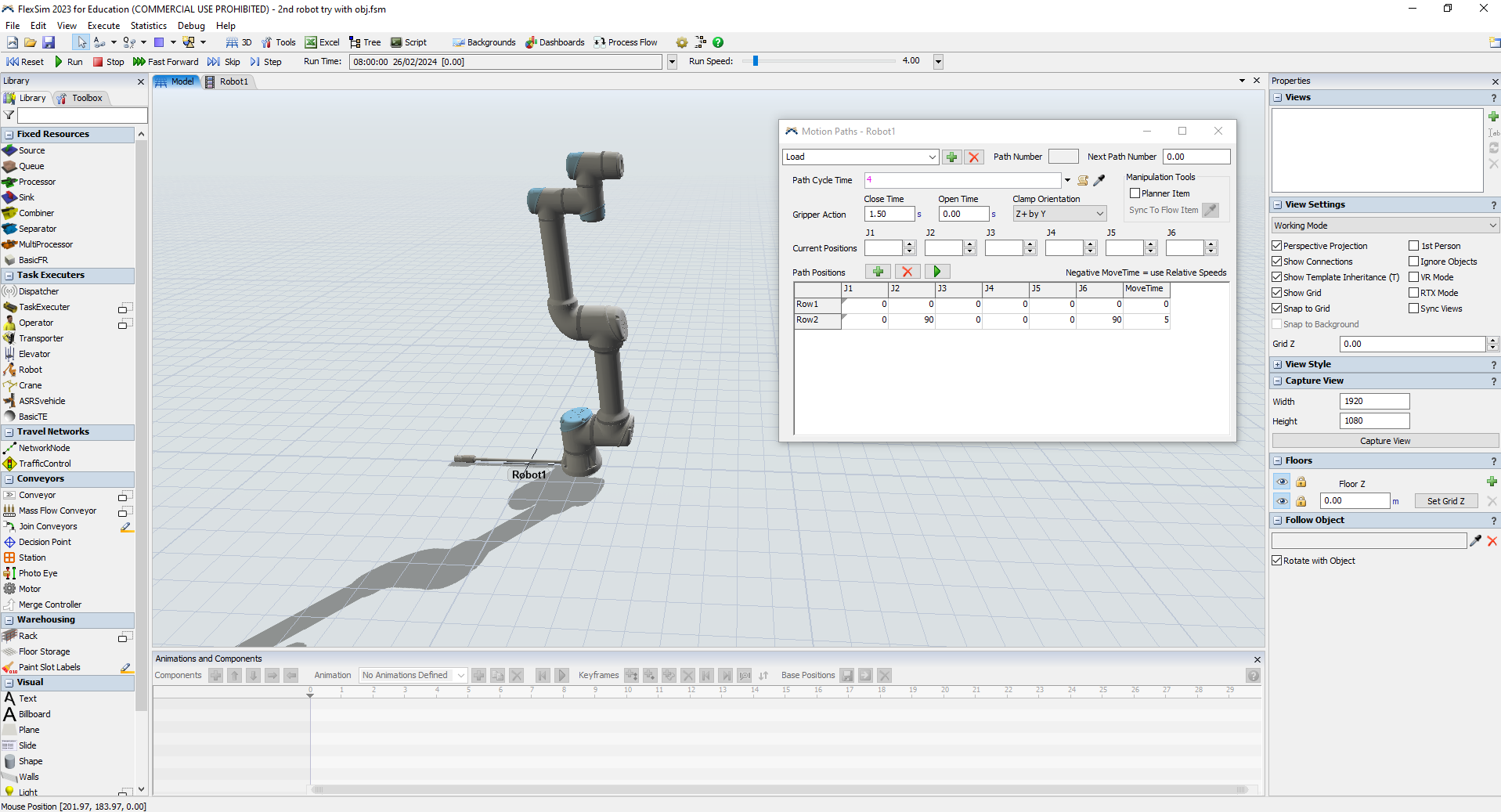
But I am facing the problem with the rotation of joints, as robot's J2, J3, J5 are not moving as intended
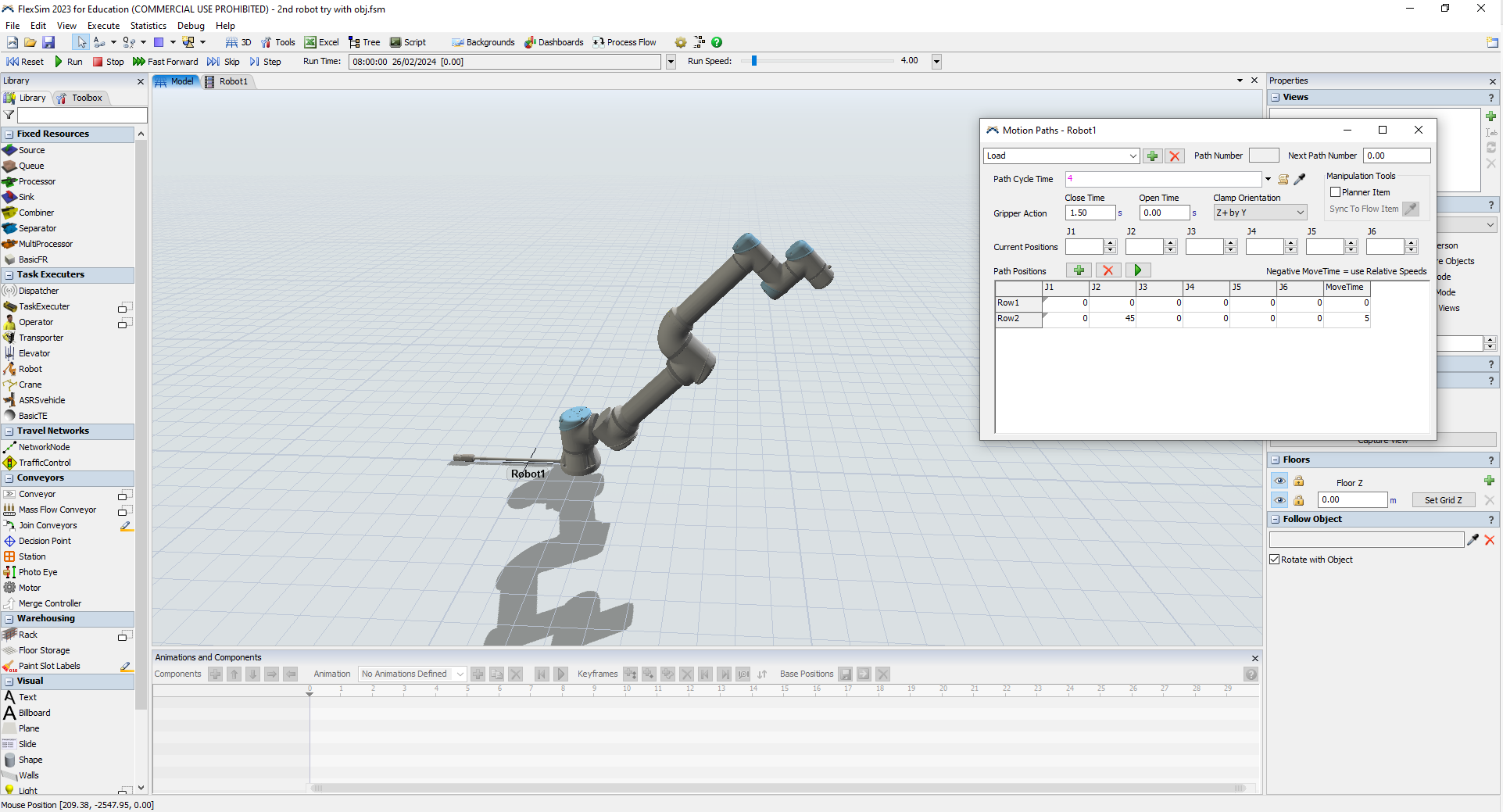
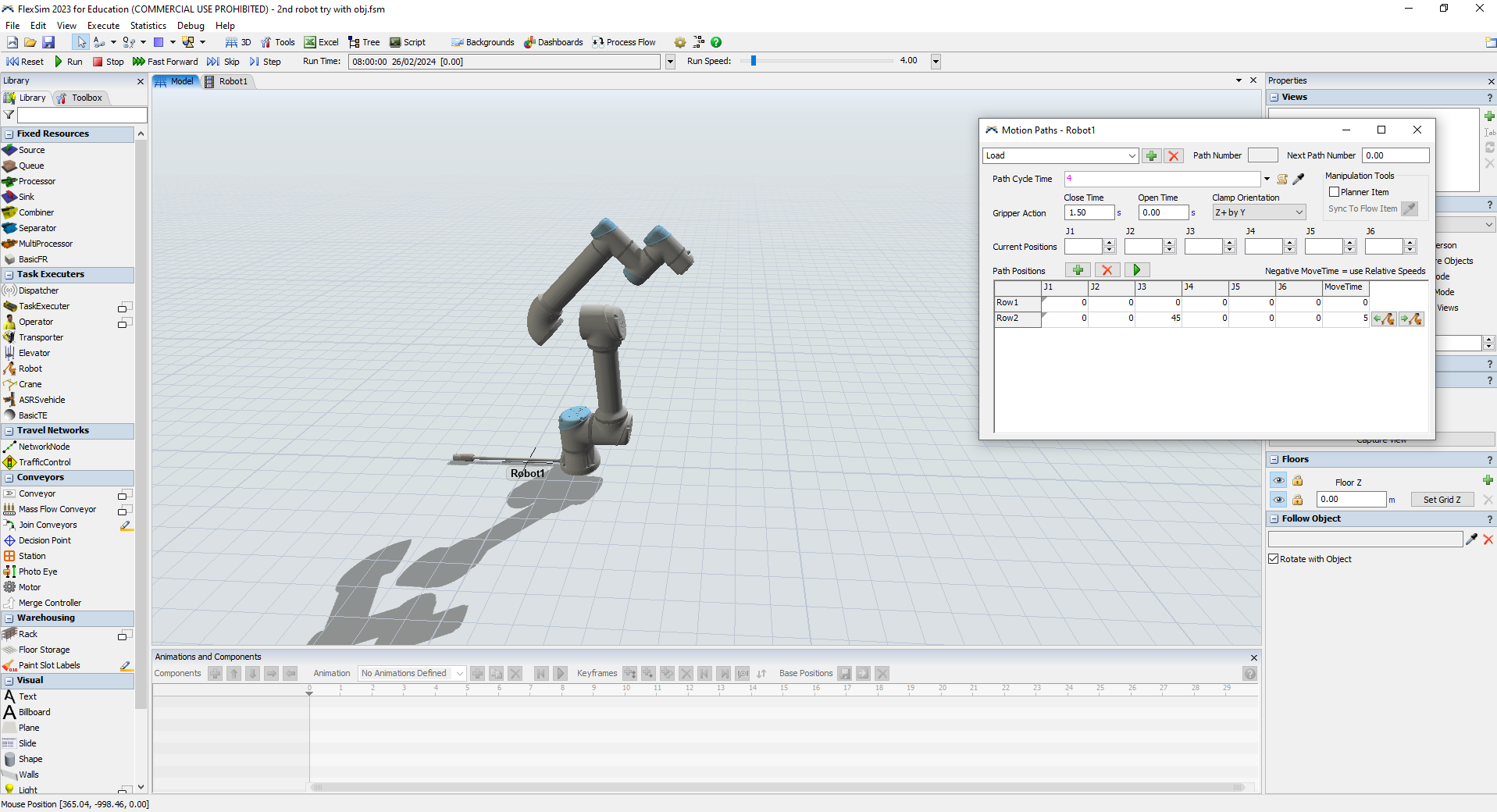
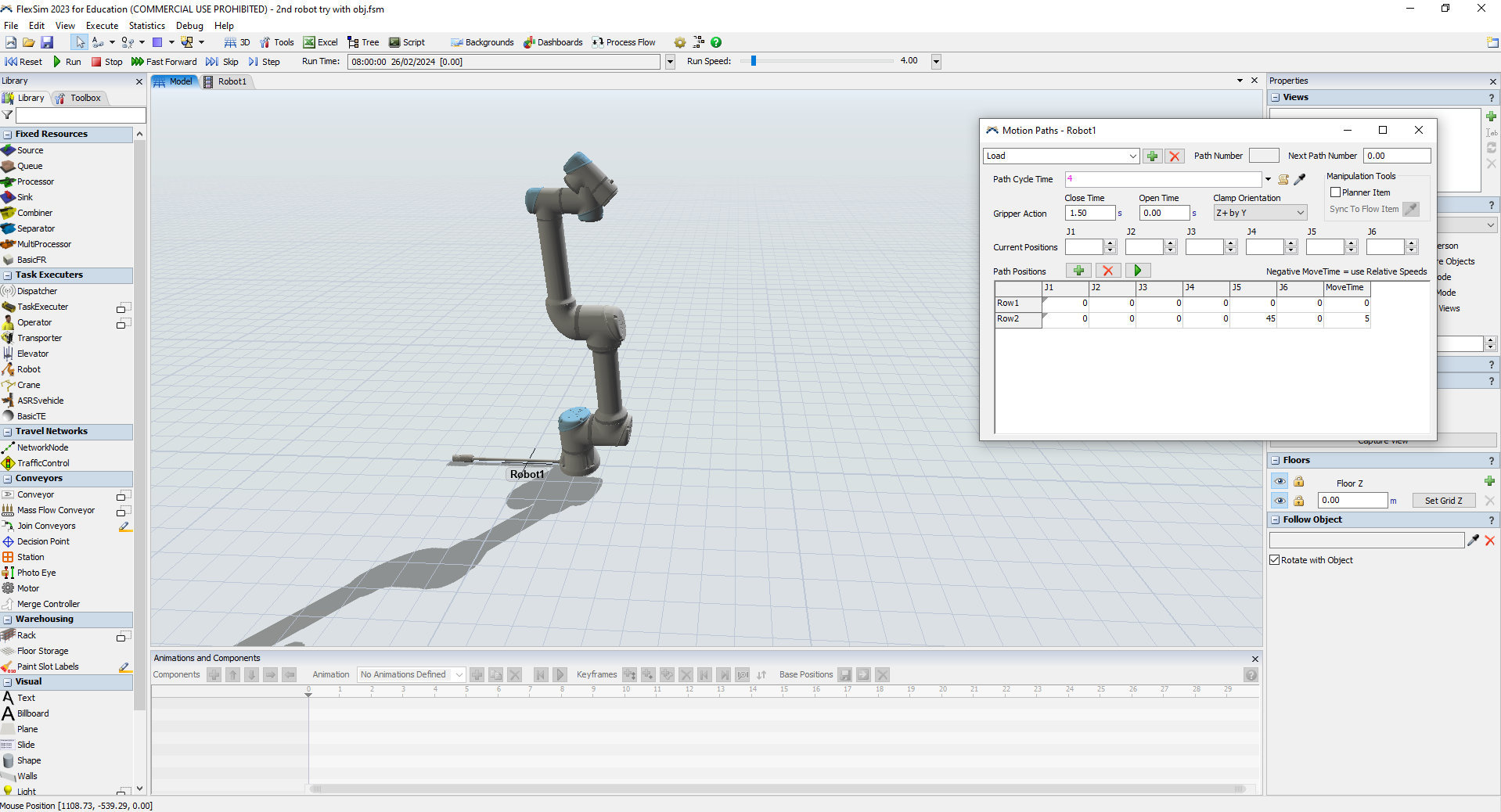
Please help me so that the rotation of the flexsim robot can mimic UR5e robot. I am attaching Flexsim file for your reference as well. 2nd robot try with obj.fsm