Hi,
In the model attached (2023_12_04 - Send AGV relative to trailer.fsm), you will find this situation :
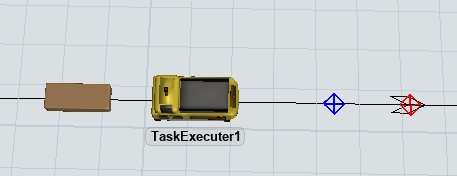
First, I send the trailer of the AGV to the blue CP :
It works as expected.
And, as you can see, the AGV has "passed" the red CP (but not the trailer).
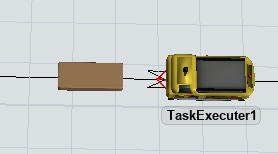
Then, I send the trailer to the red CP.
I expected the AGV system to understand that it just needs to move forward 1m, but it doesn't (the AGV will make a loop). I only have this behavior when the AGV has "passed" the destination CP which will be used in the next AGV Travel task.
Is this a normal behavior or a bug ?
If it's normal, do you have a solution to avoid this none necessary travel in this situation ?
Thanks.
