hello everyone, hope you are doing well,
i had a issue concerning the robot manipulation in my flexsim model, the main idea is that the robot has to pick a box from one queue and place on a pallet that is located in another queue, i modeled this whole process under proces flow, but its always giving me the same probleme, which is that the robot somehow cant identifie the box(the item that should be loaded), a task error is shown as the problem apears, as simple as it appears, i tried many alternatives and solutions but non of them really worked,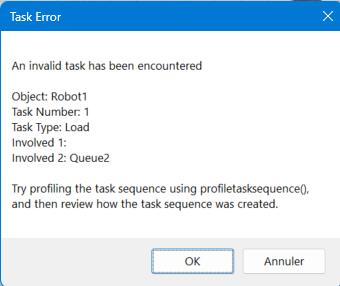 simple_example_probleme_robot.fsm
simple_example_probleme_robot.fsm
how to use robot in process flow
FlexSim 24.1.0
You do not have a reference to the items entering Queue2. What currently happens is that a token is created when an item enters the queue and this token is pushed to the list and later pulled. So you are actually telling the robot to load the token, which it of course can't do.
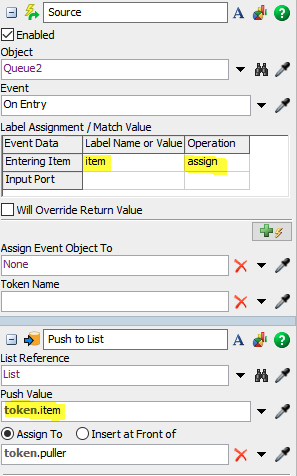
When an item enters Queue2, assign it to a label on the token, then push that value to the list.
15 People are following this question.
