In my model scenario, I have connected the Robot to the Dispatcher with A connection to the Robot. And the Dispatcher is connected to the 4 parallel stations and 2 Queues with center port connection.
My question is:
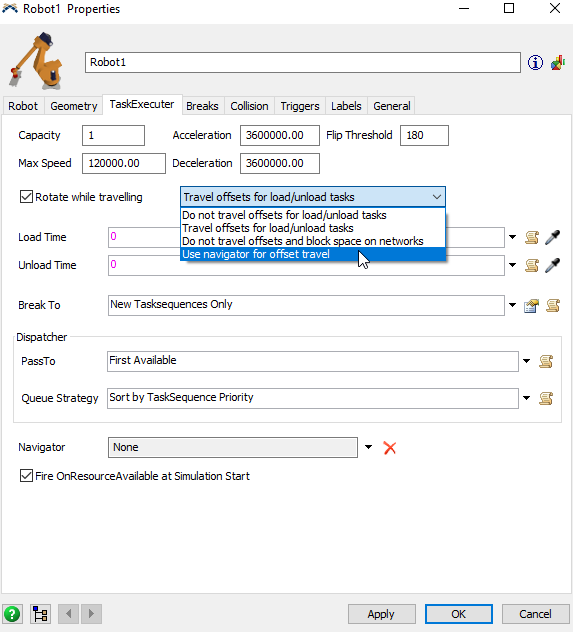
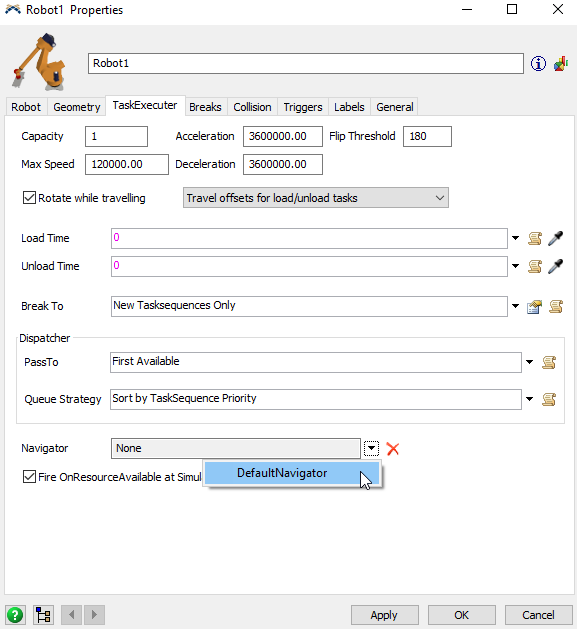
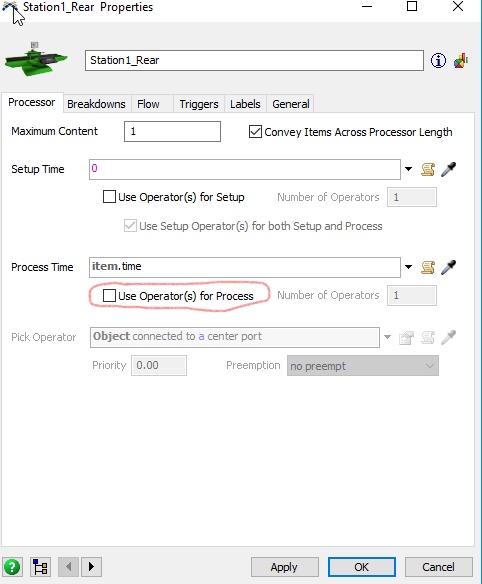
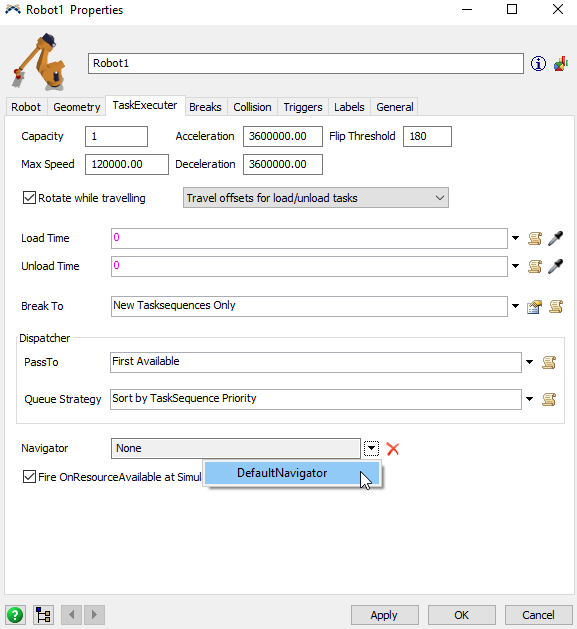
How can I move the Robot for loading and unloading of the flowitems among the 4 parallel stations? Please guide me

{kind=link}
{kind=link}
{kind=link}
{kind=link}