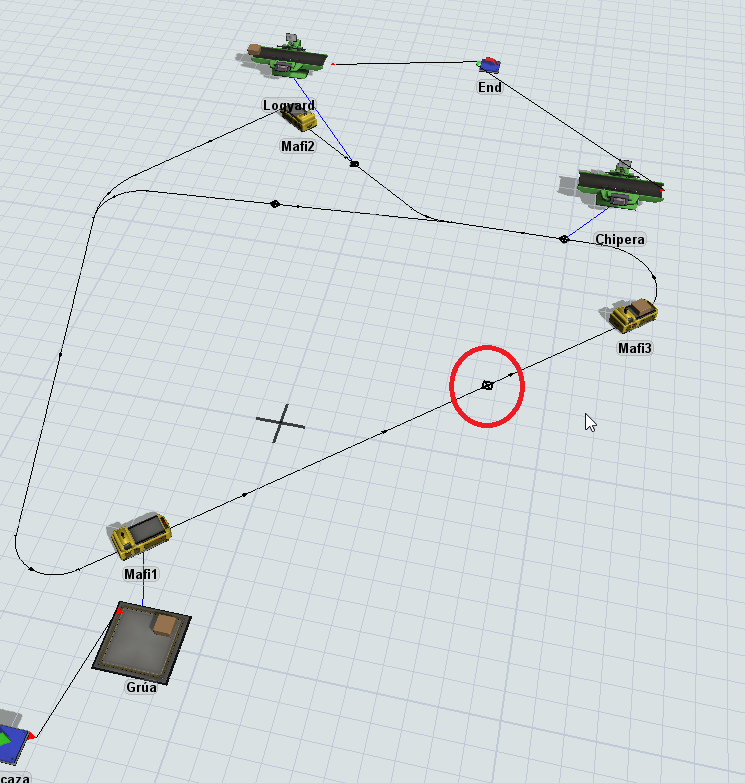
I have this model and the task executers are supposed to deliver boxes to Chipera and Logyard (Processors 1 and 2 respectively), prioritizing Chipera. For an unknown reason, after a few seconds the model is running, the task executers stop delivering flowitems to Chipera and they only deliver to Logyard.
Does anyone know how can I fix this?
Thank you very much.
Kind regards,
Felipe

{kind=link}