I am trying to create an animation with a robot that has any different locations and would like to be able to move the robot arm relative to the Tool Center Point.
Can a Robot Jog a robot with the TCP to create locations in and Animation?
FlexSim 20.0.0
Hi @Raymond F,
Is there a way that you could send us an image to help understand your problem better? I am still a little confused about what the end of arm tool and orientation of target object means.
It would also help us if you could attach a sample model.
Sorry. I come from a robot background. The end of arm tool is the tool attached to the face plate of the robot ( Joint 6 ) In Robot programming and Motion planning one should be able to use the Tool Center Point of the robot usually attached to the End of arm tool to move and rotate the robot around. Different applications are able to do this with ease Delmia and Process Simulate are a couple of examples. If there was a part on a table that I wanted the robot to pick up i would like to create a location (XYZ) and orientation (IJK) at that part for the robot to go to, The robot would be using the TCP. I will see if i can work on a model to help explain what i am looking for. Thank you
I may be not really an expert of robot programming, but as I understand a tcp can be relative to robot flange coordinates in any way. There are some useful settings but that wouldn’t be necessary to accomplish the task to pick items. As long as there isn’t an assembly task to be performed or a process of welding, joints movement is sufficient for simple material handling and much more tasks. It is just important that the robot tool is aligned to item where you pick it.
if you need exact coordinates I just would place items along a path to be picked by the robot to get the angles of the joints.
One thing to note about FlexSim is that flowitems only carry a location relative to their owner object. For example, a box in a Queue aligned at the top left corner will have an (x,y) coordinate of (0,0).
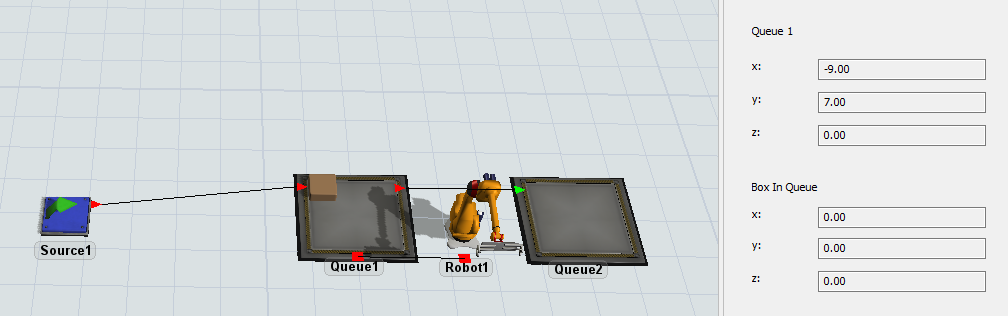
It may be possible to create an absolute location of the box as a sum of the Queue and box coordinates. However if either of them is rotated, then the math gets complicated.
Let me know if this helps. On the model, you can drag the box around and watch it's location coordinates update.
12 People are following this question.