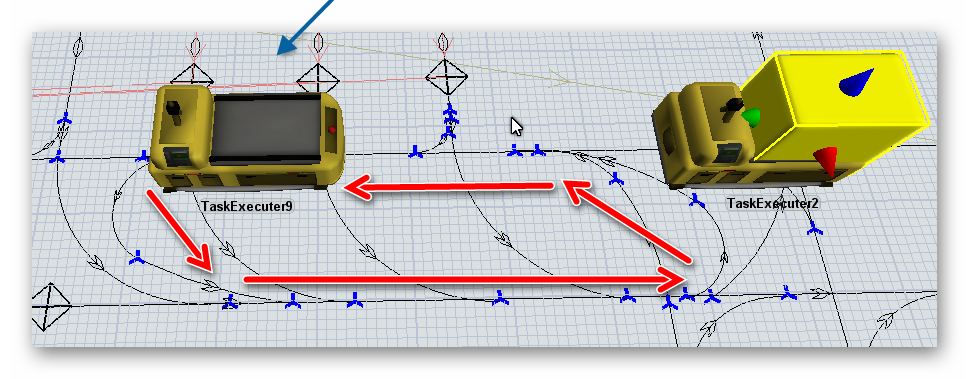
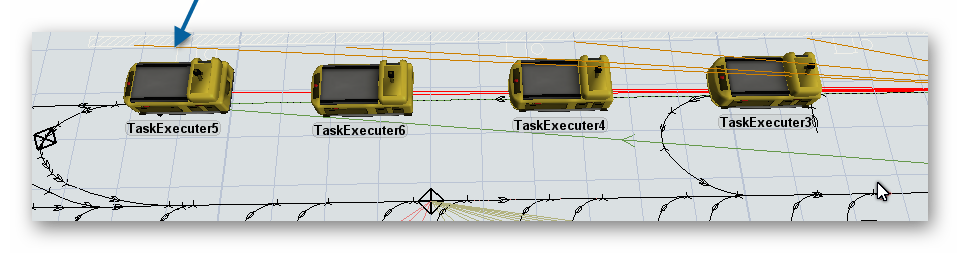
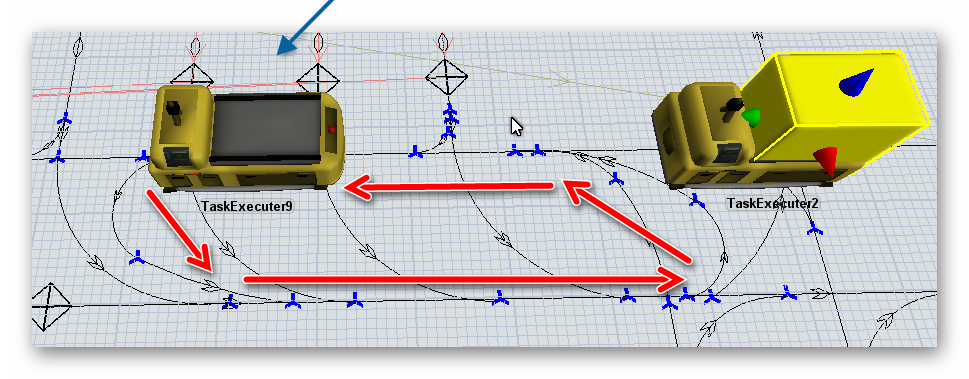
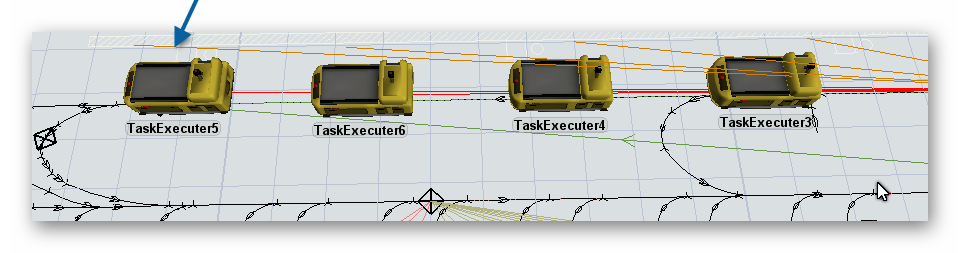
Hi, I tried to push a parked AGV in front.
In my demo-model all parkpoints are on the traveler path (like in my real big model with multiple cycles). Every time if a parked AGV in front, that AGV have to drive a extra cycle to the next parkposition in the model. My AGV logic is a little bit similar to the AGV-Modul, but without NextLockForWork points. Because every time when an AGV as unloaded an item, he have to look in the worklist for the next order. I tried different things but I found no solution. I also found no solutions in this forum.
Someone have an idea? Thanks a lot!

{kind=link}
{kind=link}