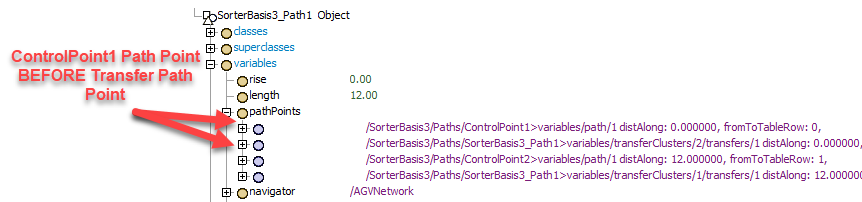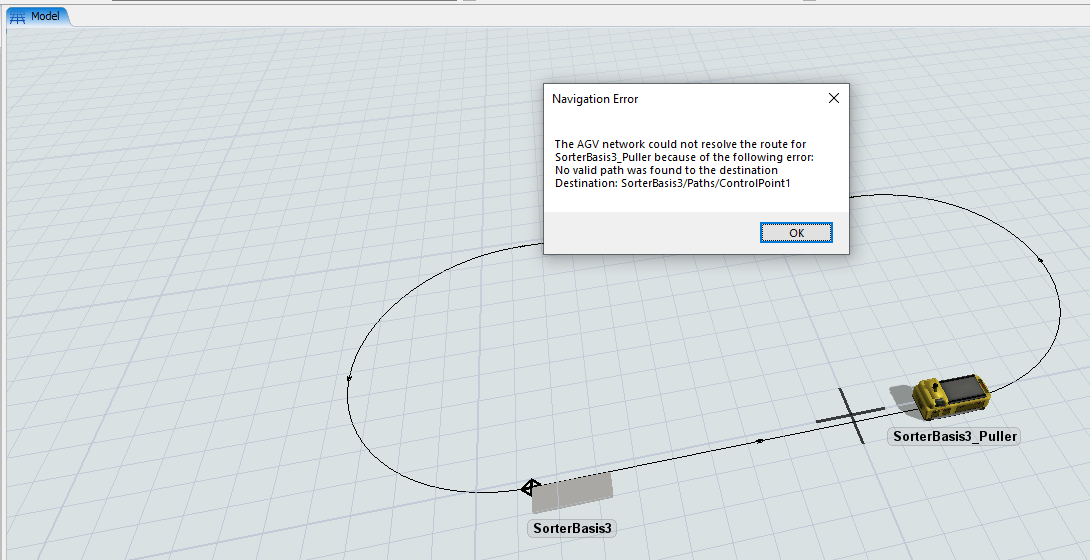
I've built a simple AGV network from code (using createinstance to create some paths, setting their variables and then calling finalizeSpatialChanges). It looks OK, with the directions of the paths and the transfer points between them. I put two control points on the first section of the path and want to send an AGV from ControlPoint1 to ControlPoint2 to ControlPoint1, but for some reason the second leg cannot find a path.
Even when I put ControlPoint2 all the way at the end of the loop, right before ControlPoint1, it seems that the path from 2 to 1 is somehow broken.
It may be related to the fact that my paths and CPs are in a custom container, or I may have just forgotten to call a certain behavior function somewhere... but at the moment I cannot even figure out why the network seems broken, so I'd appreciate any help there.