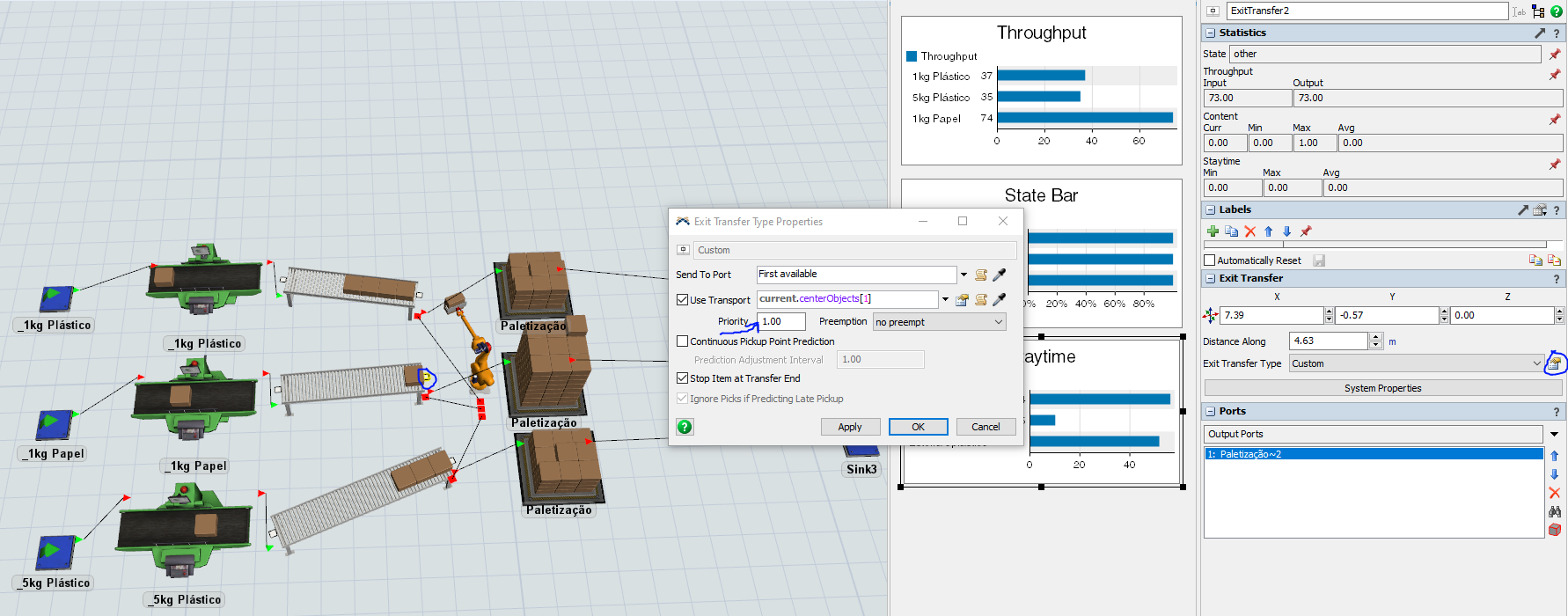
Hello. I am making a simulation for improve a process. The second conveyor fills and form a queue while the others don't. I want the robot to always prioritize the second conveyor and attend it first every time there is a box queueing there. However, I’ve been unable to configure the robot to work with this priority system. Is there a way to make the robot operate this way?
Thanks in advance.