Hello! It has been an ongoing issue for awhile now, my FlexSim would crash upon changing the hierarchy of a component. Though, this doesn't happen to every object that I create custom animations for just a few. However, as of now, FlexSim keeps crashing even when I try to change the hierarchy of a component from a standard FlexSim robot.
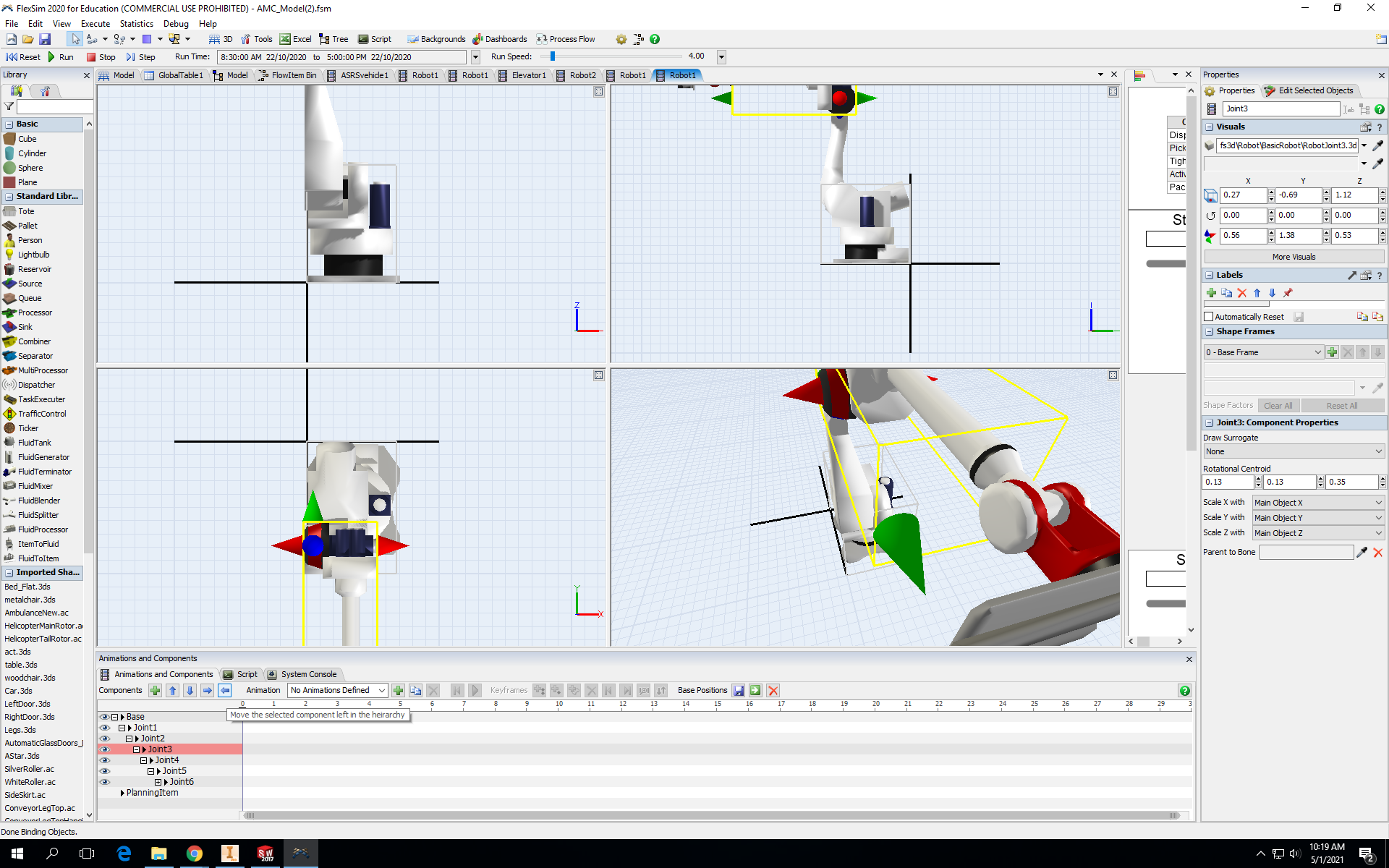
As seen from the image attached below, FlexSim will crash when I try to shift joint3 to the left of the hierarchy.
Unfortunately, the size of my file is too large even after compressing. Please let me know if you would like for the file to be sent via email. Thank you!