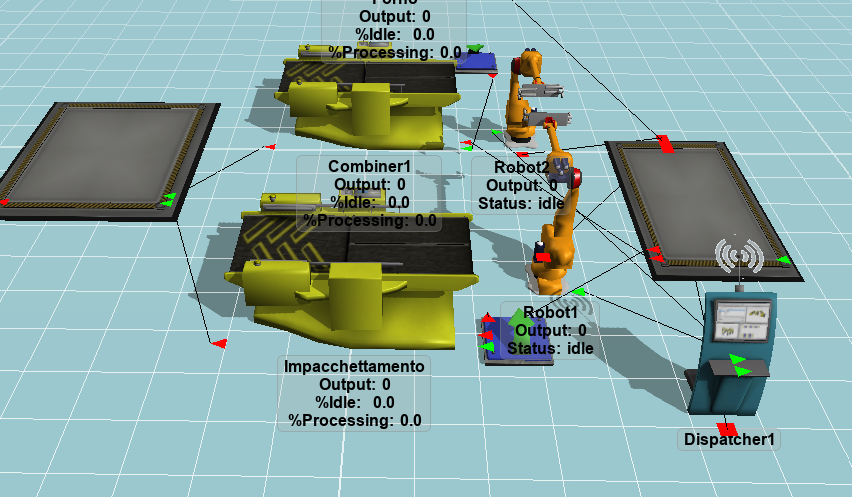
Hi! That's my model. I wanto to apply Reinforcement Learning to the robot called Robot1. The idea is that the robot, based on the number of boxes on the pallet placed on combiner1, should choose on which combiner to deposit the box. Each pallet collects 10 boxes before passing the load to the left queue. Robot1 should help Robot2 load the boxes on the pallet present on combiner1 until the number of boxes on the pallet becomes more than 6. As soon as this happens, Robot1 must start carrying the boxes on the combiner called "Impacchettamento" First I want to identify as a variable the instantaneous number of boxes on the pallet present on combiner1. Next I want to identify as an integer the combiner that robot1 is using. I need these variables to identify the observations and actions of the RL.
